|
Программные системы и вычислительные методы
Правильная ссылка на статью:
Сергеев Д.А., Родионов Д.Г., Поляков П.А., Голиков Г.И., Старченкова О.Д., Дмитриев Н.Д., Конников Е.А. Интеллектуальная система мониторинга и адаптации маршрута беспилотных летательных аппаратов на основе нейросетевого анализа объектов риска // Программные системы и вычислительные методы. 2025. № 1. С. 55-70. DOI: 10.7256/2454-0714.2025.1.73255 EDN: UZVYID URL: https://nbpublish.com/library_read_article.php?id=73255
Интеллектуальная система мониторинга и адаптации маршрута беспилотных летательных аппаратов на основе нейросетевого анализа объектов риска
Сергеев Дмитрий Анатольевич
кандидат экономических наук
доцент Высшей инженерно-экономической школы; Санкт-Петербургский политехнический университет Петра Великого
194021, Россия, г. Санкт-Петербург, ул. Новороссийская, 50
Sergeev Dmitry Anatolyevich
PhD in Economics
Associate Professor at the Graduate School of Industrial Economics; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk St., 50

|
sergeev_da@spbstu.ru
|
|
 |
Родионов Дмитрий Григорьевич
ORCID: 0000-0002-1254-0464
доктор экономических наук
профессор; директор Высшей инженерно-экономической школы; Санкт-Петербургский политехнический университет Петра Великого
194021, Россия, г. Санкт-Петербург, ул. Новороссийская, 50
Rodionov Dmitry Grigoryevich
Doctor of Economics
Professor; Director at the Graduate School of Industrial Economics; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk str., 50
|
|
drodionov@spbstu.ru
|
|
|
Другие публикации этого автора
|
|
Поляков Прохор Александрович
исследователь лаборатории «Политех-Инвест»; Санкт-Петербургский политехнический университет Петра Великого
194021, Россия, г. Санкт-Петербург, ул. Новороссийская, 50
Polyakov Prohor Aleksandrovich
Researcher at the Laboratory "Polytech-Invest"; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk St., 50
|
|
prohor@polyakov-box.ru
|
|
|
Голиков Глеб Игоревич
ORCID: 0009-0008-0538-0942
исследователь лаборатории «Политех-Инвест»; Санкт-Петербургский политехнический университет Петра Великого
194021, Россия, г. Санкт-Петербург, ул. Новороссийская, 50
Golikov Gleb Igorevich
Researcher at the Laboratory "Polytech-Invest"; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk str., 50
|
|
golikov.23@mail.ru
|
|
|
Старченкова Олеся Дмитриевна
ORCID: 0009-0009-1168-2362
Специалист лаборатории «Моделирование и цифровизация социально-экономических систем»; Санкт-Петербургский политехнический университет Петра Великого
194021, Россия, г. Санкт-Петербург, ул. Новороссийская, 50
Starchenkova Olesya Dmitrievna
Specialist at the Laboratory "Modeling and Digitalization of Socio-Economic Systems"; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk str., 50
|
|
starchenkova_od@spbstu.ru
|
|
|
Дмитриев Николай Дмитриевич
ORCID: 0000-0003-0282-1163
кандидат экономических наук
доцент; Высшая инженерно-экономическая школа; Санкт-Петербургский политехнический университет Петра Великого
Заведующий лабораторией; Лаборатория «Моделирование и цифровизация социально-экономических систем»; Санкт-Петербургский политехнический университет Петра Великого
194021, Россия, г. Санкт-Петербург, ул. Новороссийская, 50
Dmitriev Nikolai Dmitrievich
PhD in Economics
Associate Professor at the Graduate School of Industrial Economics; Peter the Great St. Petersburg Polytechnic University
Head of the Laboratory 'Modeling and Digitalization of Socio-Economic Systems'; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk str., 50
|
|
dmitriev_nd@spbstu.ru
|
|
|
Другие публикации этого автора
|
|
|
Конников Евгений Александрович
ORCID: 0000-0002-4685-8569
кандидат экономических наук
доцент Высшей инженерно-экономической школы; Санкт-Петербургский политехнический университет Петра Великого
Заведующий лабораторией «Политех-Инвест»; Санкт-Петербургский политехнический университет Петра Великого
194021, Россия, г. Санкт-Петербург, ул. Новороссийская, 50
Konnikov Evgenii Aleksandrovich
PhD in Economics
Associate Professor at the Graduate School of Industrial Economics; Peter the Great St. Petersburg Polytechnic University
Head of the Laboratory «Polytech-Invest»; Peter the Great St. Petersburg Polytechnic University
194021, Russia, Saint Petersburg, Novorossiysk str., 50
|
|
konnikov_ea@spbstu.ru
|
|
|
|
DOI: 10.7256/2454-0714.2025.1.73255
EDN: UZVYID
Дата направления статьи в редакцию:
04-02-2025
Дата публикации:
03-04-2025
Аннотация:
Исследуется интеллектуальная система мониторинга и адаптации маршрута беспилотных летательных аппаратов (БПЛА) на основе нейросетевого анализа объектов риска. Рассматриваются алгоритмы автономной навигации, обеспечивающие анализ внешней среды и оперативную корректировку траектории полёта с учётом потенциальных угроз. Оцениваются возможности применения машинного зрения, нейросетевых алгоритмов, методов предобработки данных, детектирования объектов, семантической сегментации, алгоритмов траекторного планирования, предиктивного управления и адаптивной оптимизации маршрутов для идентификации препятствий, движущихся объектов и зон ограничения полётов. Анализируется роль интеллектуальных систем управления в архитектуре БПЛА, их влияние на повышение автономности, устойчивости и эффективности выполнения задач в динамически изменяющихся условиях. Предлагаемые решения ориентированы на снижение рисков, связанных с нештатными ситуациями, за счёт внедрения адаптивных стратегий управления полётом. Применяются методы системного анализа, компьютерного зрения и машинного обучения, включая свёрточные нейросети, алгоритмы предобработки изображений, фильтрации и сегментации данных, а также анализ сенсорных показателей. Оценка эффективности реализована посредством моделирования траекторий движения, тестирования алгоритмов идентификации угроз и анализа параметров устойчивости маршрутов БПЛА. Научная новизна заключается в разработке интегрированной системы интеллектуальной корректировки маршрута БПЛА, основанной на применении нейросетевых методов классификации объектов и адаптивных алгоритмов планирования траекторий. Разработаны механизмы предиктивного анализа рисков, обеспечивающие автоматическую корректировку маршрута при обнаружении препятствий, неблагоприятных погодных условий и зон ограниченного доступа. Предложенная архитектура управления сочетает технологии машинного зрения, анализа потоков данных и автоматизированного принятия решений, а также использует методы динамической маршрутизации, алгоритмы корректировки полёта в реальном времени и стратегии предотвращения столкновений. Такой подход обеспечивает повышение уровня автономности работы дронов. Разработанные алгоритмы интеллектуальной навигации могут быть внедрены в современные системы автономного управления БПЛА, обеспечивая адаптацию к динамическим условиям и повышение эффективности выполнения задач в различных сферах, включая оборонные и промышленные применения.
Ключевые слова:
Система принятия решений, Интеллектуальное управление, Нейросетевой анализ, Машинное зрение, Глубокое обучение, Автономная навигация, Предотвращение угроз, Оптимизация маршрута, Беспилотные летательные аппараты, Адаптивные алгоритмы
Работы выполнены в рамках реализации проекта «Разработка методологии формирования инструментальной базы анализа и моделирования пространственного социально-экономического развития систем в условиях цифровизации с опорой на внутренние резервы» (FSEG-2023-0008).
Abstract: The study examines an intelligent monitoring and route adaptation system for unmanned aerial vehicles (Drones) based on neural network risk analysis. The research considers autonomous navigation algorithms that enable environmental analysis and real-time trajectory correction in response to potential threats. The possibilities of applying computer vision, neural network algorithms, data preprocessing methods, object detection, semantic segmentation, trajectory planning algorithms, predictive control, and adaptive route optimization are assessed for identifying obstacles, moving objects, and restricted flight zones. The role of intelligent control systems for drones is analyzed, along with their impact on enhancing autonomy, resilience, and operational efficiency in dynamically changing environments. The proposed solutions are aimed at risk mitigation associated with emergency situations through the implementation of adaptive flight control strategies. The study employs methods of systems analysis, computer vision, and machine learning, including convolutional neural networks, image preprocessing algorithms, data filtering and segmentation, as well as sensor data analysis. The effectiveness assessment is carried out through trajectory modeling, testing of threat identification algorithms, and analysis of UAV route stability parameters. The scientific novelty lies in the development of an integrated system for intelligent UAV route correction based on neural network object classification methods and adaptive trajectory planning algorithms. Mechanisms for predictive risk analysis have been developed, ensuring automatic route adjustment upon detecting obstacles, adverse weather conditions, and restricted-access zones. The proposed control architecture integrates computer vision technologies, data stream analysis, and automated decision-making while using dynamic routing methods, real-time flight correction algorithms, and collision avoidance strategies. This approach enhances the level of UAV autonomy. The developed intelligent navigation algorithms can be implemented in modern autonomous UAV control systems, enabling adaptation to dynamic conditions and increasing the efficiency of task execution across various domains, including defense and industrial applications.
Keywords: Decision-Making System, Intelligent Control, Neural Network Analysis, Computer Vision, Deep Learning, Autonomous Navigation, Threat Prevention, Route Optimization, Unmanned Aerial Vehicles, Adaptive Algorithms
Введение. С развитием технологий беспилотных летательных аппаратов (БПЛА) растет потребность в интеллектуальных системах управления, способных эффективно адаптировать маршрут с учетом реальных угроз и изменений окружающей среды [1]. Одним из перспективных направлений является использование нейросетевых технологий для анализа объектов риска и принятия оперативных решений о корректировке маршрута. В различных сферах, включая транспорт, промышленность, логистику и оборону, возрастает сложность задач, которые требуют автономного или полуавтономного управления [2]. В таких условиях традиционные системы управления уже не всегда способны эффективно справляться с динамичными изменениями окружающей среды. Это обусловлено несколькими ключевыми факторами: увеличение объема данных, сложные и динамичные условия эксплуатации, повышение требований к безопасности, спрос на оптимизацию ресурсов и необходимость автономной работы [3].
По уровню интеллекта выделяют следующие интеллектуальные системы управления [4]:
· Экспертные системы, которые используют заранее прописанные правила и базы знаний для выполнения задач.
· Обучаемые системы, в которых при помощи машинного обучения повышается эффективность работы на основе новых данных.
· Системы с искусственным интеллектом представляют собой полностью автономные решения, способные анализировать данные, прогнозировать и принимать решения без вмешательства человека.
Цель статьи – создание устройства с искусственным интеллектом, которое в реальном времени:
1. Анализирует окружающую обстановку с использованием данных с камер, сенсоров и внешних источников.
2. Идентифицирует потенциальные угрозы (объекты риска), такие как погодные условия, препятствия, зоны ограничения полетов и движущиеся объекты.
3. Модифицирует маршрут БПЛА для обеспечения безопасности и повышения эффективности выполнения задачи.
Примером успешного выполнения задач в заявленном направлении являются изобретения российских ученых – новые модели дронов «Микроб» и «Касатка» с функциями искусственного интеллекта. Элементы ИИ позволяют дрону самостоятельно сопровождать и поражать цель [5]:
1. Высокая степень автономности. Искусственный интеллект обеспечивает возможность функционирования дронов без непосредственного контроля оператора, что повышает их эффективность в сложных боевых условиях.
2. Возможность адаптации к изменяющейся обстановке в реальном времени. Он использует камеры и тепловизоры для построения карты местности и анализа объектов.
3. Распознавание дружественных и вражеских целей.
4. Возможность работы в составе роя дронов с распределением задач между аппаратами.
Особенность таких дронов – их системность, являясь частью единой концепции использования беспилотных систем, они взаимодействуют в рамках комплексной стратегии. «Касатка» анализирует данные о цели с помощью ИИ, принимает стратегические решения и координирует действия «Микробов» [6]. Они, в свою очередь, выполняют тактические задачи, такие как сбор разведывательной информации, нанесение точечных ударов или отвлечение внимания противника. Применение дронов в рамках единой системы разведывательного обеспечения обеспечивает интеграцию данных с различных сенсоров и платформ, формируя целостную картину оперативной обстановки [7].
Данный аспект приводит авторов к ключевому термину «нейросетевой анализ объектов риска» – применению технологий искусственного интеллекта и глубокого обучения для выявления, классификации и прогнозирования потенциальных угроз в различных средах [8]. Этот подход используется для анализа данных, поступающих от сенсоров, камер, радаров и других источников, и позволяет автоматизировать процесс оценки рисков, что особенно важно в динамичных и сложных условиях, таких как военные действия. Благодаря использованию данных с дронов, спутниковых снимков и наземных сенсоров нейросети могут быстро определять приоритетные цели, прогнозировать их поведение и предлагать оптимальные тактики реагирования. Такие технологии могут применяться для оптимизации маршрутов войск или техники, минимизируя риски столкновения с опасностями, такими как артиллерийские обстрелы или зоны минных полей [9].
Реализация. В процессе анализа преимуществ внедрения был выделен комплекс преимуществ использования беспилотных летательных аппаратов для передачи информации. Среди таковых можно выделить [10]:
1. Повышение оперативности развёртывания сетей связи. Использование БПЛА в качестве мобильных ретрансляторов позволяет существенно ускорить процесс развёртывания и перенастройки каналов связи на новом месте. При выходе из строя или недостаточной пропускной способности штатных узлов связи БПЛА могут оперативно заменить или дополнить существующую инфраструктуру, обеспечивая непрерывность командования и управления боевыми подразделениями [11].
2. Гибкая масштабируемость и резервирование. Благодаря возможности быстрого изменения количества и типа беспилотных летательных аппаратов, а также их распределения в зоне операции подобные комплексы позволяют динамически масштабировать сеть под конкретные задачи. При угрозе вывода из строя одного из звеньев сети (например, потери или технической неисправности одного дрона) другие БПЛА способны взять на себя его функции, обеспечивая высокий уровень отказоустойчивости [12].
3. Расширенный радиус действия и непрерывность связи. БПЛА могут действовать за пределами прямой видимости наземных узлов, увеличивая дальность и охват сети. Это особенно актуально в ситуациях, когда традиционные станции связи подвергаются сильным помехам или находятся в неблагоприятных условиях (горная местность, лесные массивы, инфраструктурные разрушения и т.д.) [13].
4. Эффективное противодействие радиоэлектронной борьбе. Высокая мобильность и быстрота перебазирования БПЛА осложняет их обнаружение и целенаправленное подавление средствами РЭБ [14].
5. Снижение нагрузки на спутниковые каналы. При высокой интенсивности обмена данными (например, в ходе крупной операции) спутниковые каналы могут перегружаться или быть ограничены помехами и внешними факторами. БПЛА, выступающие в роли альтернативных или дублирующих каналов связи, разгружают спутниковые сети и повышают общую пропускную способность комплексной системы связи [15].
6. Повышение конфиденциальности и трудность в обнаружении. Благодаря возможности изменения высоты полёта, маршрутов и дальности действия дроны могут создавать временные каналы связи, которые труднее отслеживать противнику. При условии передачи оперативных и разведывательных данных только посредством прямого физического контакта с дроном через USB-каналы, такое решение существенно затрудняет попытки перехвата информации [16].
Следовательно, с позиции технической реализации дрона в соответствии с изложенными теоретическими преимуществами критически важной является разработка системы автономной корректировки траектории движения БПЛА, что достигается посредством последовательного применения следующих программных и технических методов [17]:
1. Система real-time видеофиксации окружения БПЛА, реализуемая посредством интеграции фото/видео аппаратуры в комплекс дополнительного навесного контура оборудования дрона [18].
2. Система машинного зрения, реализуемая нейросетевыми программными методами, которая ,в свою очередь, в целях обеспечения автономности операционной работы должна представлять собой интегрированное в БПЛА решение [19].
3. Система корректировки маршрута, оказывающая влияние на локальную краткосрочную траекторию движения БПЛА [20].
Комплексная техническая реализация таких решений достигается посредством разработки навесного контура. Принципиальная графическая электронная схема представлена на рисунке 1.
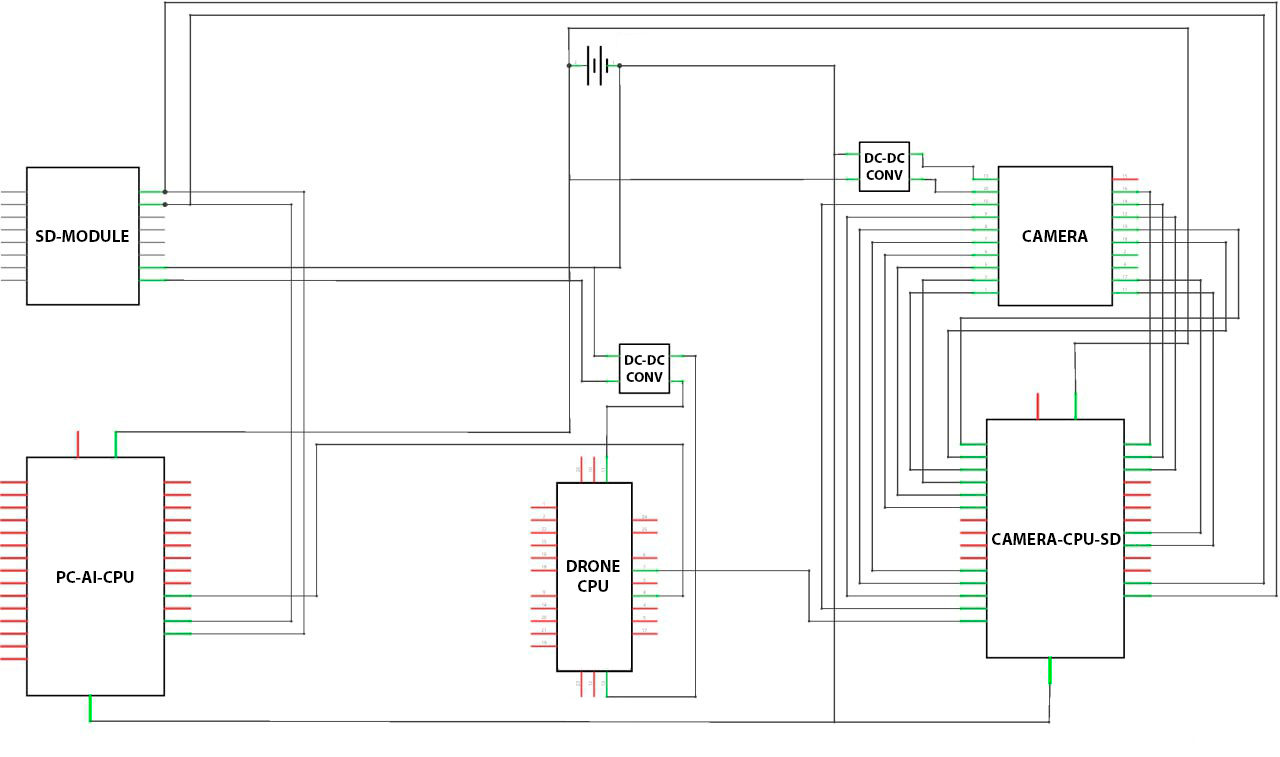
Рисунок 1 – Принципиальная графическая электронная схема навесного контура real-time корректировки маршрута
Элементы, представленные на рисунке 1, имеют следующее техническое и функциональное описание, рассмотренные в таблице 1. Логика их работы представлена в таблице 2.
Таблица 1 – Элементы в контуре системы и их описание
|
Компонент контура
|
Техническое и функциональное описание
|
|
Камера U2
|
Делает снимки в режиме реального времени, которые записываются на SD-модуль. Функционально большое количество подключений обусловлено необходимостью подачи питания, подключения параллельной передачи данных и синхронизации частоты съемки и времени передачи.
|
|
CAMERA–CPU–SD Raspberry Pi
|
Управляет камерой, регулирует её настройки и выполняет предварительную обработку снимков.
|
|
PC–AI–CPU Raspberry Pi
|
Использует полученные изображения для анализа с применением нейронной сети, выявления потенциальных угроз для дрона и выполнения поставленной задачи. В случае обнаружения угрозы подает обновленную краткосрочную траекторию полета на МК ESP.
|
|
DRONE–CPU ESP8266
|
Бортовой микроконтроллер дрона, интегрированный с ESC. Принимает от PC-AI-CPU скорректированные траектории полёта.
|
|
SD-MODULE
|
Модуль хранения SD-карты, на которую производится запись кадров с камеры и чтения снимков PC–AI–CPU Raspberry Pi.
|
Таблица 2 – Логика работы представленных компонентов в составе единого аппаратного контура
|
Шаг
|
Описание
|
|
1. Сбор данных
|
Камера фиксирует изображения с заданным временным интервалом и сохраняет их на SD-модуль.
|
|
2. Анализ данных
|
Raspberry Pi с помощью нейронной сети анализирует присутствие угроз для дрона на снимках. При обнаружении угроз формируется управляющий сигнал с формированием обновленной краткосрочной траекторией полета дрона.
|
|
3. Реакция на угрозы
|
ESP8266 – главный полётный микроконтроллер дрона, интегрированный с ESC. При необходимости он корректирует траекторию движения, принимая обновлённые параметры.
|
|
4. Управление и конфигурация
|
Предусмотрена возможность регулирования настроек камеры и обновления алгоритмов обработки изображений на втором Raspberry Pi.
|
Методология тестирования. Экспериментальная проверка была проведена с целью оценки работоспособности автономного беспилотного летательного аппарата при отсутствии GPS-сигнала. В состав системы входил модуль нейросетевого анализа угроз. Для тестирования были разработаны сценарии, имитирующие реальные условия эксплуатации. Испытания проводились как в симулированной среде, так и на открытой площадке, где GPS-сигнал был преднамеренно отключён или заглушен.
В качестве тестового устройства использовался квадрокоптер массой около ~1.5 кг, оснащённый бортовым компьютером для обработки нейросетевых алгоритмов. Навигационная система включала инерциальные датчики, барометр и монокулярную камеру.
Полёты выполнялись по заранее определённому маршруту длиной примерно ~500 м с возвратом в точку старта. В ходе экспериментов использовалась альтернативная навигация, основанная на данных одометров и алгоритмах компьютерного зрения. Для оценки корректности работы системы вводились искусственные угрозы. В качестве таковых выступали внезапно появляющиеся препятствия и запретные зоны, которые аппарат должен был идентифицировать с помощью обученной нейросети. Архитектура модели включала сверточную нейросеть, ориентированную на классификацию типовых угроз. В случае обнаружения опасности беспилотник должен был оперативно корректировать траекторию.
Для оценки эффективности проводился анализ реакции системы на различные факторы внешней среды. В ходе испытаний варьировались: скорость ветра (в диапазоне 0–8 м/с), плотность препятствий (редкие или многочисленные объекты), а также порог чувствительности детектора угроз. Каждая комбинация условий проверялась в не менее чем 10 повторных полётах.
Фиксировались количественные параметры, отражающие успешность выполнения задач. В ходе тестирования анализировались: доля завершённых миссий; траектория движения аппарата; временной интервал между обнаружением угрозы и началом манёвра уклонения; количество ложных срабатываний детектора; точность классификации препятствий. Методологический подход позволил собрать статистически значимые данные и провести количественную оценку функционирования системы в воспроизводимых условиях.
Результаты экспериментов. На графике (Рис. 2) по оси X представлены изменяемые факторы, такие как скорость ветра (в м/с) и плотность препятствий (в баллах). По оси Y показан обобщённый критерий эффективности полёта, например, процент успешно пройденного маршрута или вероятность успешного завершения миссии.
Анализ данных показывает, что с увеличением сложности условий успешность выполнения полётов снижается монотонно. Увеличение скорости ветра свыше 5 м/с приводит к росту ошибки стабилизации и снижению числа успешно выполненных полётов. Ветровое воздействие до 2–3 м/с практически не влияет на результат.
Аналогичная тенденция прослеживается при изменении плотности препятствий. С увеличением числа объектов в зоне полёта возрастает время облёта и количество манёвров уклонения. После порога в 5 препятствий на 100 м пути наблюдается резкое снижение успешности миссии. В условиях экстремальной перегрузки маршрута показатель эффективности стремится к нулю.
Наибольшее влияние на успешность выполнения задач оказывает сложность окружающей среды. При высокой плотности препятствий и сильном ветре система достигает предельных значений устойчивости. Для повышения эффективности работы алгоритмов требуется адаптация методов навигации.
Рисунок 2 – График зависимости показателя успешности полёта от нескольких факторов среды демонстрирует чувствительность системы к внешним воздействиям.
На рисунке 3 представлена гистограмма плотности распределения вероятностей успешности полёта, отражающая статистическое распределение исходов по совокупности всех проведённых испытаний. По горизонтальной оси отложено значение рассчитанного показателя успешности полёта, а по вертикальной – плотность (частота) наблюдений данного значения. Распределение имеет выраженную двухмодальную форму. Основной пик сосредоточен в области положительных значений показателя (от 0 до 1), что соответствует успешным полётам. Меньший пик наблюдается в области отрицательных значений, что свидетельствует о частых отказах системы.
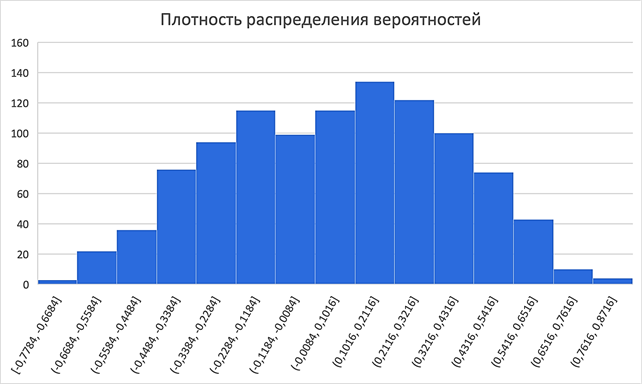
Рисунок 3 – Гистограмма плотности распределения вероятностей успеха полёта отражает статистическое распределение исходов по совокупности всех проведённых испытаний.
Анализ данных показывает, что у большинства запусков вероятность успешного завершения миссии находится в диапазоне 0.7–0.9, что подтверждает надёжность работы системы в штатных условиях. Однако зафиксирована группа испытаний, в которых система не смогла завершить миссию. Отрицательные значения по шкале X гистограммы (рисунок 3) соответствуют полному провалу полёта. В данных случаях дрон не достиг конечной точки или был вынужден выполнить аварийную посадку.
Площадь под левой частью гистограммы отражает частоту неудач. В ходе экспериментов около 15% запусков завершились отказом, тогда как 85% испытаний привели к успешному или частично успешному выполнению полётного задания.
Анализ результатов демонстрирует, что вероятность благоприятного исхода остаётся высокой в большинстве случаев. Однако сохраняется риск отказа системы, который необходимо учитывать при дальнейшей оптимизации алгоритмов и конфигурации аппаратного обеспечения.
Критический анализ. Полученные результаты подтверждают работоспособность предложенной системы, однако выявляют ряд ограничений текущей реализации.
Во-первых, зафиксирована зависимость эффективности от условий внешней среды. При сочетании сложных факторов система приближается к пределу своих возможностей, что свидетельствует о недостаточной робастности модели в экстремальных случаях. Подобная уязвимость к нестандартным ситуациям характерна для автономной навигации. Динамичные и сложные условия создают значительные вызовы для беспилотного летательного аппарата [21].
Во-вторых, нейросетевой анализ угроз демонстрирует высокую точность в среднестатистическом случае, однако не является полностью безошибочным. Зафиксированы ложные срабатывания (false positives), когда безопасные объекты ошибочно классифицировались как угрозы, а также пропуски реальных препятствий. Подобные ошибки приводили либо к избыточно осторожным манёврам, либо к запоздалой реакции на угрозу. Сходные эффекты отмечены в других исследованиях. Например, показано, что даже при общей точности классификации около ~90% некоторые алгоритмы демонстрируют до 40% ложных тревог в сложных сценах [22]. В ходе проведённых испытаний ложные тревоги составили примерно ~8% обнаружений угроз. Данный результат свидетельствует о необходимости дальнейшей оптимизации алгоритмов фильтрации.
Дополнительным ограничением является накопление погрешности навигации при отсутствии GPS. Применение методов визуальной одометрии и инерциальных датчиков позволило снизить дрейф координат, однако ошибка продолжала накапливаться. На коротких дистанциях данное отклонение несущественно, но при длительном полёте без внешних ориентиров возможны значительные отклонения, которые в текущей реализации не компенсируются.
Кроме того, выявлено увеличение вычислительной нагрузки при активном использовании нейросетевого модуля. В ходе экспериментов зафиксировано возрастание среднего времени отклика системы примерно на 20%. Ограниченные ресурсы бортового компьютера и энергопотребление могут создать проблемы для обработки данных в режиме реального времени.
Наконец, испытания проводились в преимущественно контролируемых условиях. Не исследовались сценарии преднамеренного радиоэлектронного подавления каналов связи, а также появление принципиально новых типов угроз, отсутствующих в обучающей выборке нейросети.
Потенциальные направления оптимизации включают расширение и разнообразие обучающих данных для нейросети, что позволит снизить вероятность ошибок классификации. Перспективным решением является внедрение механизмов самокоррекции навигации, например, периодическая калибровка положения с использованием наземных ориентиров или альтернативных сенсоров. Существенного улучшения вычислительной эффективности можно достичь за счёт оптимизации программно-аппаратной части, что снизит задержки обработки данных. Дополнительные способы повышения устойчивости включают применение ансамблевых методов обнаружения угроз, совмещающих несколько алгоритмов, а также использование адаптивных стратегий планирования траектории с учётом степени уверенности нейросетевого детектора.
Количественные метрики и сравнение с существующими подходами. Для объективной оценки были рассчитаны количественные метрики, которые затем сопоставлялись с характеристиками альтернативных решений.
Средняя успешность полётов в условиях отсутствия GPS составила 85–88% (доля завершённых миссий без аварии). Данный результат несколько ниже, чем у аналогичных систем, функционирующих при наличии устойчивого GPS-сигнала. Например, в одном из недавних исследований на симуляторе продвинутый метод на основе глубокого обучения продемонстрировал более 90% успешных полётов в сценарии с подавленным GPS. При использовании точных координат цели данный показатель достигал 95% [21]. Средний результат текущей системы (~88%) близок к этому уровню, что подтверждает её конкурентоспособность.
При сравнении с традиционными алгоритмами навигации без GPS (например, инерциальная одометрия с реагированием на препятствия по заранее заданным правилам) зафиксировано явное улучшение. В ходе экспериментов упрощённая версия системы без нейросетевого модуля продемонстрировала успешность около ~70%. Более низкие показатели объясняются большим числом аварийных случаев из-за несвоевременного распознавания препятствий.
Одним из значимых параметров эффективности является время адаптации маршрута при возникновении угрозы. В представленном решении средний временной интервал между моментом обнаружения препятствия и началом манёвра уклонения составил порядка 1.3 секунд. Для сравнения, система без интеллектуального анализа угроз демонстрировала задержку до 2–3 секунд. Подобная разница объясняется проактивной природой нейросетевого детектора, который фиксирует препятствия раньше и тем самым сокращает время на перестроение траектории.
Точность классификации угроз в предложенном решении достигла 92% (по совокупности типов объектов и ситуаций). Данный показатель достаточно высок, однако уступает узкоспециализированным системам. Например, в задачах кибернетической безопасности беспилотников зафиксирована возможность достижения точности порядка ~99.99% на тестовых наборах данных [23]. В условиях реального полёта с физическими угрозами достижение столь высокой точности затруднительно, поэтому 92% является удовлетворительным показателем.
Нейросетевой детектор демонстрирует баланс между точностью и широтой охвата угроз. Альтернативные системы, не использующие машинное обучение, обычно ориентированы либо на минимизацию ложных тревог ценой пропуска части опасных ситуаций, либо наоборот. Например, стандартные алгоритмы обнаружения препятствий (лидарные технологии или методы компьютерного зрения) обеспечивают приемлемую навигацию в простых условиях, но уступают представленному подходу по интегральной вероятности успешного полёта и скорости реагирования.
Сравнительный анализ метрик подтверждает, что внедрение нейросетевого анализа угроз в автономную навигацию беспилотного летательного аппарата без GPS даёт значительное преимущество в надёжности и эффективности полёта. Однако остаётся пространство для дальнейшей оптимизации модели и совершенствования алгоритмов.
Заключение. Разработанная система автономной корректировки траектории беспилотного летательного аппарата, основанная на нейросетевом анализе потенциальных угроз, демонстрирует эффективное взаимодействие аппаратных и программных модулей, обеспечивающих мониторинг и оперативное реагирование в реальном времени. Видеосенсорный блок осуществляет непрерывный сбор данных, которые анализируются алгоритмами машинного обучения для своевременного выявления опасных объектов и оценивания окружающей обстановки. Полученные данные применяются для формирования управляющих сигналов, обеспечивающих корректировку маршрута дрона и предотвращение столкновений или иных рисков. Предложенная методика обеспечивает высокий уровень надёжности и автономности, что особенно значимо при функционировании в сложных и быстро изменяющихся условиях. Интеграция систем машинного зрения, анализа данных и принятия решений доказывает свою практическую ценность как в военных, так и в гражданских сценариях, где предъявляются жёсткие требования к точности, устойчивости связи и максимальной безопасности. Дальнейшая оптимизация таких решений способствует увеличению автономности беспилотных комплексов, повышает их эффективность в различных сферах и обеспечивает адаптацию маршрутов с учётом метеорологических условий, загруженности воздушного пространства и иных факторов, снижая материальные и человеческие потери.
Библиография
1. Яковлев А. Г., Баранов Д. Е., Шишкин М. Д. О современном состоянии и тенденциях применения новых материалов и технологий в конструкциях беспилотных летательных аппаратов // Вектор науки Тольяттинского государственного университета. 2014. № 1. С. 71-74.
2. Варламов О. О. Об одном подходе к метрике автономности и интеллектуальности робототехнических комплексов // Известия Кабардино-Балкарского научного центра РАН. 2017. № 6-2. С. 43-53.
3. Коптев В. А. Анализ БПЛА как актуальных радиолокационных целей и их маскирующих факторов // Международный журнал гуманитарных и естественных наук. 2024. № 6-1. С. 244-250.
4. Варламов О. О., Лазарев В. М., Чувиков Д. А., Джха П. О перспективах создания автономных интеллектуальных роботов на основе миварных технологий // Радиопромышленность. 2016. № 4. С. 96-105.
5. В России разработали новые многофункциональные дроны «Касатка» и «Микроб» [Электронный ресурс]. URL: https://aif.ru/society/army/v-rossii-razrabotali-novye-mnogofunkcionalnye-drony-kasatka-i-mikrob (дата обращения: 26.01.2025).
6. В России представили новые многофункциональные разработки для СВО [Электронный ресурс]. URL: https://news.mail.ru/svo/64559772/ (дата обращения: 26.01.2025).
7. Малышев В. П., Виноградов О. В. Возможные направления повышения устойчивости организаций, необходимых для выживания населения при современных военных конфликтах // Проблемы анализа риска. 2023. № 5. С. 60-70.
8. Корнеев Д. С. Использование аппарата нейронных сетей для создания модели оценки и управления рисками предприятия // Управление большими системами: сборник трудов. 2007. № 17. С. 81-102.
9. Овчинский В. С. Технологии будущего против криминала. М.: ЛитРес, 2019.
10. Белякова Е. В., Прокопович Д. А., Рыжая А. А., Гильц Н. Е. Логистический подход к технологическому развитию промышленного комплекса региона // Вестник Сибирского государственного аэрокосмического университета им. академика М.Ф. Решетнева. 2015. № 4. С. 1007-1013.
11. Вырелкин А. Д., Кучерявый А. Е. Использование беспилотных летательных аппаратов для решения задач «умного города» // Информационные технологии и телекоммуникации. 2017. № 1. С. 105-113.
12. Криничко В. А., Князев Е. А. Применение БПЛА в боевой работе командиров // Научный аспект. 2023. № 8. С. 537-546.
13. Довгаль В. А., Довгаль Д. В. Анализ безопасности роя дронов, противостоящего атакам злоумышленников // Дистанционные образовательные технологии: сборник трудов V Международной научно-практической конференции. Симферополь: Ариал, 2020. С. 372-377.
14. Ласточкин Ю. И., Ярыгин Ю. Н., Бывших Д. М. Методическое обеспечение обоснования способов боевого применения сил и средств радиоэлектронной борьбы при противодействии радиоэлектронной разведке в операциях объединений сухопутных войск // Военная мысль. 2018. № 6. С. 58-66.
15. Бурченков В. В. Автоматизированные системы контроля подвижного состава. Гомель: Белорусский государственный университет транспорта, 2020. 226 с.
16. Боровик В. С., Гуцул В. И., Клестов С. А., Фирсов И. С., Пыхтырев В. С., Шатравин В. В., Сырямкин В. И., Шидловский С. В., Шашев Д. В., Нгуен К. Т., Угрюмов Д. А., Сырямкин М. В. Коллективы интеллектуальных роботов. Сферы применения. Томск: СТТ, 2018. 140 с.
17. Терентьев В. Б. Метод свёртки вероятностных и параметрических показателей летательного аппарата // Фундаментальные и прикладные научные исследования: актуальные вопросы. 2019. С. 51.
18. Сорокин И. А., Романов П. Н., Чесноков А. Д., Кондраненкова Т. Е. Математическая модель обработки изображений опасных и вредоносных растений с камеры БПЛА // Вестник НГИЭИ. 2023. № 5. С. 20-32.
19. Али Б., Садеков Р. Н., Цодокова В. В. Алгоритмы навигации беспилотных летательных аппаратов с использованием систем технического зрения // Гироскопия и навигация. 2022. № 4. С. 87-105.
20. Костин А. С. Информационно-измерительные системы для контроля выполнения траектории авиационной системы // Волновая электроника и инфокоммуникационные системы: материалы XXIV Международной научной конференции. Часть 1. 2021. С. 219-226.
21. Xu Y., Wei Y., Wang D., Jiang K., Deng H. Multi-UAV Path Planning in GPS and Communication Denial Environment // Sensors (Basel). 2023. Vol. 23. № 6. P. 2997.
22. Vera-Yanez D., Pereira A., Rodrigues N., Molina J.P., García A.S., Fernández-Caballero A. Vision-Based Flying Obstacle Detection for Avoiding Midair Collisions: A Systematic Review // J. Imaging. 2023. Vol. 9. P. 194.
23. Alharthi R. Enhancing unmanned aerial vehicle and smart grid communication security using a ConvLSTM model for intrusion detection // Front. Energy Res. 2024. Vol. 12. P. 1491332.
References
1. Yakovlev, A. G., Baranov, D. E., & Shishkin, M. D. (2014). On the current state and trends in the application of new materials and technologies in the structures of unmanned aerial vehicles. Vector of Science of Togliatti State University, 1, 71-74.
2. Varlamov, O. O. (2017). On one approach to the metric of autonomy and intelligence of robotic complexes. Proceedings of the Kabardino-Balkar Scientific Center of the Russian Academy of Sciences, 6-2, 43-53.
3. Koptsev, V. A. (2024). Analysis of UAVs as relevant radar targets and their masking factors. International Journal of Humanities and Natural Sciences, 6-1, 244-250.
4. Varlamov, O. O., Lazarev, V. M., Chuvikov, D. A., & Jha, P. (2016). Prospects for the creation of autonomous intelligent robots based on mivar technologies. Radio Industry, 4, 96-105.
5. New multifunctional drones "Kasatka" and "Mikrob" developed in Russia. (n.d.). Retrieved January 26, 2025, from https://aif.ru/society/army/v-rossii-razrabotali-novye-mnogofunkcionalnye-drony-kasatka-i-mikrob
6. New multifunctional developments for SVO presented in Russia. (n.d.). Retrieved January 26, 2025, from https://news.mail.ru/svo/64559772/
7. Malychev, V. P., & Vinogradov, O. V. (2023). Possible directions for increasing the resilience of organizations necessary for the survival of the population in modern military conflicts. Problems of Risk Analysis, 5, 60-70.
8. Korneev, D. S. (2007). The use of neural networks for the creation of risk assessment and management models for enterprises. Management of Large Systems: Collection of Works, 17, 81-102.
9. Ovchinskiy, V. S. (2019). Technologies of the future against crime. LitRes.
10. Belyakova, E. V., Prokopovich, D. A., Ryzhaya, A. A., & Giltz, N. E. (2015). Logistic approach to the technological development of the industrial complex of the region. Bulletin of Siberian State Aerospace University named after academician M.F. Reshetnev, 4, 1007-1013.
11. Virelkin, A. D., & Kucheryavy, A. E. (2017). The use of unmanned aerial vehicles to solve "smart city" tasks. Information Technology and Telecommunications, 1, 105-113.
12. Krinichko, V. A., & Knyazev, E. A. (2023). Application of UAVs in the combat work of commanders. Scientific Aspect, 8, 537-546.
13. Dovgal, V. A., & Dovgal, D. V. (2020). Analysis of the security of a swarm of drones against attacks by malicious actors. Distance Education Technologies: Proceedings of the V International Scientific and Practical Conference. Ariyal.
14. Lastochkin, Y. I., Yarygin, Y. N., & Byvshikh, D. M. (2018). Methodological support for justifying methods of combat use of electronic warfare forces and means against electronic intelligence in operations of ground forces associations. Military Thought, 6, 58-66.
15. Burchenkov, V. V. (2020). Automated control systems for rolling stock. Belarusian State University of Transport.
16. Borovik, V. S., Hutsul, V. I., Klestov, S. A., Firsov, I. S., Pyhtyrev, V. S., Shatravin, V. V., Syryamkin, V. I., Shidlovsky, S. V., Shashev, D. V., Nguyen, K. T., Ugryumov, D. A., & Syryamkin, M. V. (2018). Teams of intelligent robots: areas of application. STT.
17. Terentyev, V. B. (2019). The method of convolution of probabilistic and parametric indicators of an aircraft. Fundamental and Applied Scientific Research: Current Issues, 51.
18. Sorokin, I. A., Romanov, P. N., Chesnokov, A. D., & Kondranevkova, T. E. (2023). Mathematical model for processing images of dangerous and harmful plants from UAV cameras. Bulletin of NGIEI, 5, 20-32.
19. Ali, B., Sadekov, R. N., & Tsodokova, V. V. (2022). Navigation algorithms for unmanned aerial vehicles using technical vision systems. Gyroscopy and Navigation, 4, 87-105.
20. Kostin, A. S. (2021). Information-measuring systems for monitoring the trajectory execution of aviation systems. Wave Electronics and Infocommunication Systems: Proceedings of the XXIV International Scientific Conference, Part 1, 219-226.
21. Xu, Y., Wei, Y., Wang, D., Jiang, K., & Deng, H. (2023). Multi-UAV path planning in GPS and communication denial environment. Sensors (Basel), 23(6), 2997.
22. Vera-Yanez, D., Pereira, A., Rodrigues, N., Molina, J. P., García, A. S., & Fernández-Caballero, A. (2023). Vision-based flying obstacle detection for avoiding midair collisions: A systematic review. J. Imaging, 9, 194.
23. Alharthi, R. (2024). Enhancing unmanned aerial vehicle and smart grid communication security using a ConvLSTM model for intrusion detection. Front. Energy Res., 12, 1491332.
Результаты процедуры рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
Статья посвящена разработке интеллектуальной системы мониторинга и адаптации маршрута беспилотных летательных аппаратов (БПЛА) с применением технологий искусственного интеллекта и нейросетевого анализа. Основное внимание уделено методам идентификации потенциальных угроз в режиме реального времени и корректировке траектории дронов для обеспечения их безопасности и повышения эффективности выполнения задач.
Авторы опираются на комплексный подход, включающий:
- Анализ существующих интеллектуальных систем управления БПЛА.
- Описание принципов работы экспертных систем, машинного обучения и ИИ в контексте автономного управления.
- Разработку модели автономной корректировки маршрута с применением машинного зрения и анализа данных с сенсоров.
- Практическую реализацию системы на базе Raspberry Pi и ESP8266 с применением камер, модулей хранения данных и программных алгоритмов машинного обучения.
Использованный методологический подход логичен и обоснован, однако в статье отсутствует экспериментальная проверка работоспособности системы на реальных данных или ее сравнение с существующими решениями. Добавление таких аспектов значительно повысило бы доказательность представленных результатов.
Работа затрагивает актуальные вопросы автономного управления БПЛА, которые находят применение в различных сферах – от военных операций до логистики и промышленности. Учитывая стремительный рост использования беспилотных систем, тема является востребованной. Особенно важен предложенный подход к анализу рисков и модификации маршрутов на основе данных с камер и сенсоров.
Научная новизна статьи заключается в предложенной системе нейросетевого анализа рисков и адаптации маршрута БПЛА в реальном времени. Основные нововведения включают:
- Применение машинного зрения для идентификации угроз.
- Автоматическую корректировку траектории с учетом обнаруженных факторов.
- Интеграцию нескольких аппаратных и программных компонентов в единую систему.
Тем не менее, статья могла бы включать более детальное сравнение с существующими методами, что позволило бы точнее оценить новизну подхода.
Статья написана в академическом стиле, структура работы логична и последовательна. Выделены основные разделы, такие как введение, описание методов, реализация и заключение. Однако текст содержит избыточные описания технических деталей аппаратных решений, что усложняет восприятие информации. Было бы полезно сократить или вынести технические подробности в отдельные приложения.
В статье практически отсутствует критическое обсуждение альтернативных подходов и возможных недостатков предложенной системы. Было бы полезно включить анализ ограничений работы, возможных направлений улучшения модели и сравнение с существующими решениями.
Выводы четко обобщают результаты исследования и подтверждают эффективность предложенной системы. Однако они носят преимущественно описательный характер и не включают количественные метрики, подтверждающие практическую ценность разработанной модели. Следует добавить сравнительный анализ с другими системами или результаты тестирования.
Работа представляет интерес для специалистов в области автоматизированных систем управления, искусственного интеллекта и разработки БПЛА. Ее могут использовать как исследователи, так и инженеры, занимающиеся разработкой автономных дронов.
Рекомендации по доработке:
1. Добавить экспериментальную проверку системы – представить данные тестирования, оценку точности обнаружения угроз, сравнение с альтернативными методами.
2. Развить критический анализ – включить обсуждение возможных недостатков метода, ограничений работы и направлений дальнейших исследований.
3. Уточнить выводы – добавить количественные метрики, подтверждающие эффективность предложенной модели.
Статья представляет собой интересное исследование в области интеллектуальных систем управления БПЛА. Работа актуальна, но требует доработки в части экспериментального подтверждения результатов, оформления и критического анализа. При исправлении указанных замечаний статья может быть рекомендована к публикации.
Рекомендация: доработка статьи с последующей повторной подачей.
Результаты процедуры повторного рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
Представленная статья на тему «Интеллектуальная система мониторинга и адаптации маршрута беспилотных летательных аппаратов на основе нейросетевого анализа объектов риска» соответствует тематике журнала «Программные системы и вычислительные методы» и посвящена актуальному вопросу использования нейросетевых технологий для анализа объектов риска и принятия оперативных решений о корректировке маршрута, что вызвано развитием технологий беспилотных летательных аппаратов и потребностью в интеллектуальных системах управления, способных эффективно адаптировать маршрут с учетом реальных угроз и изменений окружающей среды.
В статье представлен достаточно широкий анализ литературных российских и зарубежных источников по теме исследования.
В качестве цели исследования авторы указывают создание устройства с искусственным интеллектом, которое в реальном времени:
1. Анализирует окружающую обстановку с использованием данных с камер, сенсоров и внешних источников.
2. Идентифицирует потенциальные угрозы (объекты риска), такие как погодные условия, препятствия, зоны ограничения полетов и движущиеся объекты.
3. Модифицирует маршрут БПЛА для обеспечения безопасности и повышения эффективности выполнения задачи.
Стиль и язык изложения материала является научным и доступным для широкого круга читателей. Статья по объему соответствует рекомендуемому объему от 12 000 знаков.
Статья достаточно структурирована - в наличии введение, заключение, внутреннее членение основной части (реализация, методология тестирования, результаты экспериментов, критический анализ, количественные метрики и сравнение с существующими подходами).
Авторами проанализированы преимущества использования беспилотных летательных аппаратов для передачи информации. А также определено последовательное применение программных и технических методов, необходимых для разработки системы автономной корректировки траектории движения БПЛА с позиции технической реализации дрона. В качестве решения данной задачи авторы предлагают комплексную техническую реализацию посредством разработки навесного контура. Принципиальная графическая электронная схема представлена на рисунке. Также авторы дают техническое и функциональное описание элементов, представленных на графической электронной схеме, результаты представлены в таблице. Логика работы представленных компонентов в составе единого аппаратного контура также представлена авторами в табличном виде. Была проведена экспериментальная проверка с целью оценки работоспособности автономного беспилотного летательного аппарата при отсутствии GPS-сигнала. Фиксировались количественные параметры, отражающие успешность выполнения задач. В ходе тестирования анализировались: доля завершённых миссий; траектория движения аппарата; временной интервал между обнаружением угрозы и началом манёвра уклонения; количество ложных срабатываний детектора; точность классификации препятствий. Методологический подход позволил собрать статистически значимые данные и провести количественную оценку функционирования системы в воспроизводимых условиях. Результаты экспериментов представлены в графическом виде. Полученные результаты подтверждают работоспособность предложенной системы, однако авторами выявлен ряд ограничений текущей реализации - зависимость эффективности от условий внешней среды; высокая точность в среднестатистическом случае, однако не является полностью безошибочным; накопление погрешности навигации при отсутствии GPS; увеличение вычислительной нагрузки при активном использовании нейросетевого модуля.
Для объективной оценки авторами рассчитаны количественные метрики, которые затем сопоставлялись с характеристиками альтернативных решений.
Практическая значимость статьи четко обоснована. Разработанная система автономной корректировки траектории беспилотного летательного аппарата, основанная на нейросетевом анализе потенциальных угроз, демонстрирует эффективное взаимодействие аппаратных и программных модулей, обеспечивающих мониторинг и оперативное реагирование в реальном времени.
Статья «Интеллектуальная система мониторинга и адаптации маршрута беспилотных летательных аппаратов на основе нейросетевого анализа объектов риска» может быть рекомендована к публикации в журнале «Программные системы и вычислительные методы».
|









