|
DOI: 10.25136/2409-8728.2023.12.68807
EDN: VIVNFQ
Дата направления статьи в редакцию:
25-10-2023
Дата публикации:
06-12-2023
Аннотация:
В статье рассматривается управление сложными системами различной природы. Формулируются общие определения понятий «управление» и «система управления». Констатируется, что система управления в своей основе является информационнаой системой, для которой важнейшими характеристиками, определяющими ее функциональность, являются производительность и быстродействие. Даются определения производительности и быстродействия, раскрываются различия между этими характеристиками. Констатируется проблема реализуемости управления сложными системами, заключающаяся в необходимости обеспечения достаточного быстродействия, при котором весь необходимый комплекс операций управления укладывается в цикл управления. На примере технических систем (сложного технологического оборудования) исследуется связь между параметрами управления: сложностью объекта управления, длительностью цикла управления и быстродействием системы управления. В результате выявляется ряд значимых зависимостей: длительность цикла управления примерно обратно пропорциональна сложности объекта управления; быстродействие системы управления примерно пропорционально квадрату сложности объекта. Логическое подтверждение данных зависимостей позволяет распространить их на все системы управления. Исходя из предыдущих исследований авторов констатируется, что в рамках общей теории систем существуют два основных варианта повышения устойчивости сложной системы: вариант моноцентризма с центральным элементом, взаимодействие которого с другими элементами имеет эгрессионный характер, либо за счет увеличения числа связей в объекте. Первый вариант не позволяет повышать быстродействие: все команды и операции генерируются центральным элементом и итоговое быстродействие ограничено быстродействием центрального элемента. Второй вариант обеспечения устойчивости может быть реализован на практике в виде децентрализованной системы, в которой основная часть выполняемых элементами системы управления операций генерируется автономно. В результате обеспечивается реальная параллельность выполнения операций. Именно данный вариант повсеместно реализуется в живых системах и является наиболее перспективным для использования при управлении техническими системами.
Ключевые слова:
управление, система управления, быстродействие, цикл управления, реализуемость, сложность, энтропия, объект управления, децентрализация, общая теория систем
Abstract: The article deals with the management of complex systems. The general definitions of the concepts "control" and "control system" are formulated. It is stated that the control system in its basis is an information system, for which the most important characteristics are performance and rapidity. Definitions are given and differences between these characteristics are revealed. The problem of realizability of control of complex systems is stated, which consists in the necessity of providing sufficient rapidity, at which the whole necessary complex of control operations is placed in the control cycle. The relationship between the control parameters: the complexity of the control object, the duration of the control cycle and the rapidity of the control system is investigated. As a result, a number of significant dependencies are revealed: the duration of the control cycle is approximately inversely proportional to the complexity of the control object; the rapidity of the control system is approximately proportional to the square of the object complexity. It is stated that within the framework of the general theory of systems there are two main options for increasing the stability of a complex system: the option of monocentrism with a central element, or by increasing the number of links in the object. The first option does not allow increasing rapidity. The second variant of stability can be implemented in practice in the form of a decentralized system. The latter option is universally realized in living systems and is promising for the control of technical systems.
Keywords: control, control system, rapidity, control cycle, realizability, complexity, entropy, control object, decentralization, general systems theory
Введение
Одним из существенных признаков любой системы, характеризующих ее содержание, является наличие и реализация в ней управления. Для биологических, социальных, экономических, информационных, технических и др. сложных систем управление, очевидно, необходимо для обеспечения устойчивости, развития или реализации функционального назначения. Для менее сложных естественных и искусственных систем наличие и необходимость управления не всегда являются столь же очевидными.
Сложности в понимании наличия и необходимости управления в системе обусловлены существованием наряду с внешним управлением также самоуправления и саморегулирования. В частности, биологический организм обычно имеет некоторый орган самоуправления, осуществляющий общее управление организмом (например, центральная нервная система у животных), а также механизмы саморегулирования внутри каждой клетки и межклеточных обменных процессов и др.
Указанные сложности обуславливают необходимость формализации понятия «управление». Существующие определения понятия «управления» не предполагают объединения всех перечисленных частных случаев управления. Оно определяется либо как целенаправленный процесс достижения поставленной (извне) цели, либо как имеющееся в наличие самопроизвольно реализующееся свойство системы.
По мнению авторов, под управлением следует понимать процесс воздействия на систему или ее подсистемы со стороны других подсистем, внешних систем или надсистемы, обеспечивающего приведение объекта воздействия (системы или подсистемы) в состояние, необходимое для сохранения устойчивости, развития или реализации функционального назначения.
Важным частным случаем предлагаемого нами определения является воздействие на систему ее надсистемы. Примерами такого воздействия являются влияние общества на личность, экономической среды на предприятие и др. Наибольшее значение данный случай управления имеет для неживой природы, где свойства физической или химической системы изменяются (в той мере, в которой это возможно для неживых систем) под влиянием окружающей среды.
Средством реализации управления являются системы управления. Практичным подходом к классификации систем является их разделение на автономные и системы с внешним управлением. Однако, по мнению авторов, данное разделение является исключительно методологическим, обеспечивающим вариативность в представлении систем, которые необязательно качественно различаются. Любая система, представляемая как система с внешним управлением, может быть преобразована в рамках своего описания в автономную за счет расширения границ системы – объединения в одну систему управляемой системы (объекта управления) и управляющей, либо расширения системы до уровня надсистемы.
Таким образом, не ограничивая область нашего исследования всех систем управления, можно рассматривать управление только в автономных системах. В этом случае система управления представляет собой структурную (охватывающую часть структурных элементов) или функциональную (охватывающую различные структурные элементы, объединяемые общей функцией) подсистему, обеспечивающую приведение других подсистем в необходимое состояние.
Любая система управления является в своей основе информационной системой. Теория управления (наука, занимающаяся изучением принципов и методов управления системами), складывается из кибернетики [1, с. 30], определяемой как наука об управлении и обработке информации в животном, машине и обществе, и теории информации [2], определяемой как наука о количественной оценке, хранении и передаче информации. В некоторых случаях в состав системы управления включают элементы, не относящиеся непосредственно к информационной системе. В частности, в технических системах в состав системы управления могут включаться датчики или сенсоры, собирающие данные для информационной системы, или исполнительные устройства, посредством которых выходные данные информационной системы преобразуются в управляющие действия (например, перемещение рабочего органа технологического оборудования).
Важнейшими характеристиками, определяющими способность системы управления (информационной системы) выполнять свою функцию управления, являются производительность и быстродействие.
На первый взгляд, производительность и быстродействие – аналогичные характеристики, однако их практические функции существенно различаются. Производительность системы управления определяется как число элементарных операций управления за единицу времени. При этом обычно производительность рассчитывают за сравнительно большой интервал времени и для большого числа операций управления. Быстродействие системы управления — величина, обратная длительности интервала времени (цикла управления), необходимого для выполнения всего комплекса необходимых операций (обычно сравнительно небольшого) для текущего управления, равная числу единиц сложности объекта, обслуживаемых системой управления за единицу времени [3].
Согласно А.И. Уемову, существуют четыре основных подхода к определению сложности объекта [4, с. 200]: логический (определяются меры некоторых свойств отношений, которые считаются упрощающими); теоретически-информационный (в рамках которой сложность отожествляется с энтропией); алгоритмический (сложность определяется длиной алгоритма, необходимого для определения исследуемого объекта); теоретико-множественный (сложность связывается с мощностью множества элементов, из которых состоит изучаемый объект). Любой из этих подходов может быть использован для количественной оценки сложности объекта управления.
Принципиальное различие между производительностью и быстродействием наглядно проявляется в области технических систем. Современные вычислительные машины, в том числе компьютеры, обеспечивают все более высокую производительность, однако быстродействие систем управления сложным технологическим оборудованием, построенных на их основе, совершенно недостаточно для управления в реальном времени. В результате компьютерные системы управления возможны лишь для наименее сложных технических систем. В силу указанных причин при их управлении в реальном времени возникает проблема реализуемости, заключающаяся в необходимости обеспечить достаточное быстродействие системы управления, при котором весь необходимый комплекс операций управления укладывается в цикл управления, продолжительность которого определяется требованиями функционального назначения технической системы.
Как будет показано далее в статье, проблема реализуемости управления обусловлена существующей связью между сложностью объекта, удерживаемого в устойчивом состоянии (в том числе, в состоянии, соответствующем выполнению объектом своего функционального назначения) за счет внешнего (управляющего) воздействия, и скоростью роста его энтропии (хаотизации) в интервалах между управляющими воздействиями.
Связь параметров управления в сложной системе
В качестве объектов для системного анализа проблемы реализуемости управления сложными системами представляется целесообразным выбрать многокоординатные станки с числовым программным управлением, промышленные роботы и другие мехатронные системы, которые можно отнести к сложным техническим системам, в которых требуется управление в реальном времени.
Применительно к оценке объектов управления в виде различного технологического оборудования наиболее практичным является определение сложности в рамках теоретико-множественной концепции [5], в которой бесконечное множество состояний управляемого объекта сводится к счетному множеству дискретных состояний контролируемых параметров.
Согласно реализующей данный подход методологии, разработанной авторами с соавторами [3], сложность Ω объекта управления зависит от числа n типов элементов и среднего количества m элементов одного типа в системе, числа q типов связей и среднего количества g связей одного типа в системе, среднего число p контролируемых параметров, посредством которых описывается состояние отдельного элемента системы, а также среднего числа s отслеживаемых состояний контролируемого параметра:
Ω = n · m1/2 · q · g1/2 · p · s1/2.
В ходе проведенных исследований были определены значения сложности объекта управления, длительности цикла управления и необходимого быстродействия системы управления для различного технологического оборудования: двухкоординатного токарного станка с ЧПУ, лазерного станка для резки металла, трехкоординатного фрезерного станка с ЧПУ, 6-координатного робота-манипулятора, пятикоординатного обрабатывающего центра, коллаборативного робота, сборочного робота SCARA, электроэрозионного координатно-прошивочного станка с ЧПУ.
В результате была получена зависимость, представленная на рис. 1 [6], где каждый тип технологического оборудования представлен двумя квадратными маркерами (для быстродействия) и двумя треугольными маркерами (для длительности цикла управления), соответствующими предельным расчетным значениям быстродействия и длительности цикла управления для этого типа оборудования.
Между параметрами управления проявились следующие связи:
Во-первых, по мере роста сложности объекта управления сокращается допустимая длительность цикла управления. Это означает, что чем сложнее объект управления, тем чаще необходимо оказывать на него управляющее воздействие. Длительность цикла управления примерно обратно пропорциональна сложности объекта управления.
Во-вторых, по мере роста сложности объекта управления растут требования к быстродействию системы управления. Указанный рост быстродействия примерно пропорционален квадрату сложности объекта.
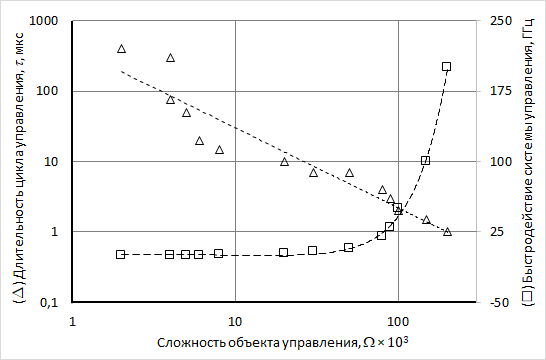
Рисунок 1. Сложность объекта управления, длительность цикла управления и необходимое быстродействие системы управления
Для определения механизмов формирования выявленных связей параметров управления используем теоретически-информационный подход к оценке сложности объекта управления, т.е. опишем изменения состояния объекта в процессе управления на языке энтропии. Согласно такому описанию (информационная) энтропия [7; 8] определяется как логарифм числа доступных состояний системы.
Для количественного описания изменений состояния объекта управления необходимо принять три допущения.
1-е допущение. Сложность объекта Ω является точной мерой числа доступных состояний (а логарифм числа доступных состояний – это энтропия):
Ω = exp(k0 + k1 · H) → H = (ln Ω − k0) / k1,
где H — текущее значения энтропии объекта управления; k0, k1 — постоянные коэффициенты.
Малое изменение энтропии ΔH, соответствующее малому изменению сложности объекта, определиться следующим образом:
ΔH = (ln (Ω + ΔΩ) − k0) / k1 − (ln Ω − k0) / k1 ≈ 1 / k1 · ΔΩ / Ω.
2-е допущение. В пределах малых интервалов времени (между управляющими воздействиями) самопроизвольный рост энтропии происходит линейно или, что тоже самое, число доступных состояний растет экспоненциально. Исходя из данного допущения устанавливаем прямую пропорциональность изменения энтропии ΔH длительности цикла управления t:
ΔH = k2 · τ, (1)
где k2 — постоянный коэффициент.
3-е допущение. Погрешность управления прямо пропорциональна изменениям (колебаниям) числа доступных состояний объекта управления. Исходя из 3-го допущения, при условии, что величина погрешности управления должна оставаться постоянной, имеем:
δ ∝ ΔΩ = k1 · Ω · ΔH = const, (2)
где δ — погрешность управления.
Объединяя выражения (1) и (2) получаем:
Ω · τ = const. (3)
Поскольку быстродействие Ψ системы управления определяется как отношение сложности объекта управления к длительности цикла управления (Ψ = Ω / τ), то можно записать:
Ω2 / Ψ = const. (4)
Формулы (3) и (4) соответствуют выявленным из рис. 1 связям параметров управления.
Поскольку полученное нами логическое объяснение наблюдаемой в сложных технических системах связи сложности объекта управления и быстродействия системы управления не предполагает учета специфики технических систем, то оно может быть расширено за пределы области технических систем. Это означает, что зависимость (4) является общей для всех систем управления.
Неуклонное повышение быстродействия системы управления по мере роста сложности объекта управления – факт, который должен приниматься как данность. Предметом дальнейшей дискуссии является не существование данной тенденции, а определение возможностей повышения быстродействия систем управления движением.
Реализуемость управления и общая теория систем
Следует заметить, что, говоря об обеспечении достаточного быстродействия системы управления для противодействия росту его энтропии, мы описываем проблему обеспечения устойчивости объекта. Другими словами, процесс обеспечение устойчивости объекта управления представляет собой противодействие росту его энтропии в промежутках между управляющими воздействиями.
Проведенные исследования показали [9], что в рамках общей теории систем существуют два основных варианта повышения устойчивости сложной системы: вариант моноцентризма с центральным элементом, взаимодействие которого с другими элементами имеет эгрессионный характер [10, книга 2, с. 118]), либо за счет увеличения числа связей в объекте.
Эгрессия, согласно А. Богданову, – это особая «централистическая» связь, «которая разлагается на более простые, ингрессивные связи; но эти связи все необратимые и сходящиеся к одному центральному комплексу, тектологическая функция которого, таким образом, существенно отличается от тектологической функции остальных» [10, книга 2, с. 101]. Ингрессия, в свою очередь – это тип «цепной связи» между разнородными элементами в структуре комплекса, которая осуществляется при помощи «посредствующих» элементов для стабилизации комплекса [10, книга 1, с. 155; 11].
Увеличение числа связей в системе при определенных условиях может обеспечить повышение ее устойчивости. Эффект повышения устойчивости многосвязной системы коррелируется с принципами функционирования сложных систем [12, с. 60-67]: принципом связанного разнообразия, согласно которому устойчивость растет по мере увеличения числа связей и их разнообразия; принципом предпочитаемой формы, согласно которому увеличение разнообразия и связанности системы повышает вероятность формирования ее устойчивой конфигурации.
Механизмы повышения устойчивости могут быть различными. В частности, при управлении сложными динамическими системами с огромным числом сложно организованных внутренних связей реакция такой системы на внешние возбуждающие факторы может быть ослабленной и заторможенной: из-за высокого быстродействия подсистем их взаимное влияние оказывается минимальным и распределенным во времени. В небольших интервалах такие многосвязные системы могут демонстрировать инвариантность от нагрузки [13]. Другим механизмом, позволяющим повысить устойчивость в многосвязных системах, является формирование между элементами множества обратных связей (как положительных, так и отрицательных), результирующее действие которых может способствовать достижению баланса в системе и повышению ее устойчивости.
Первый вариант обеспечения устойчивости (связанный с моноцентризмом) не позволяет повышать быстродействие: все команды и операции генерируются центральным элементом и итоговое быстродействие ограничено быстродействием центрального элемента.
Примером практической реализации первого варианта обеспечения устойчивости в технических системах является использование для управления движением интегрированной с компьютером системы, где функцию центрального элемента выполняет центральный процессор. Даже если дополнить компьютерную систему управления движением высокопроизводительными матричными или тензорными сопроцессорами, позволяющими выполнять огромный объем вычислений с высокой производительностью, быстродействие системы остается недостаточным для управления в реальном времени.
Среди животных формы организации с жестко централизованным управлением не встречается. Это обусловлено двумя основными причинами:
Во-первых, это неизбежно привело бы к катастрофическому снижению быстродействия управления: любые непредвиденные внешние факторы, связанные с падением дерева, обвалом почвы, нападением хищника или ответным нападением объекта охоты и т.д., представляли бы реальную угрозу жизни и здоровью животного.
Во-вторых, характер организации живых организмов несовместим с такой централизацией системы управления. Основой их устойчивости является реализация автономности на каждом из уровней организации, причем как эволюционных (т.е. на каждом этапе эволюции вида), так и структурных (в пределах клетки, органа) и функциональных (в рамках отдельного обменного процесса, реализующего функцию организма). Живой организм не формируется сразу весь и готовый (как это возможно для технических систем), а образуется и изменяется в процессе эволюции. Поэтому в нем никогда не складывается условий, в которых такая жестко централизованная система управления могла бы сформироваться.
Второй вариант обеспечения устойчивости (связанный с увеличением числа связей) может быть реализован на практике в виде децентрализованной системы, в которой основная часть выполняемых элементами системы управления операций генерируется автономно, без участия (или с минимальным участием в виде диспетчеризации команд) центрального элемента. В результате обеспечивается реальная параллельность выполнения операций.
Для живых систем (биологических, социальных, экономических) децентрализация является основной формой организации, поскольку наилучшим образом обеспечивает быстродействие управления. Это особенно важно при сравнительно малых (для обмена данными с неким единым центром) скоростях передачи и обработки информации в нервной системе животных, в системе государственного управления, в дилинге на рынке товаров, услуг или валюты и т.д. Элементы децентрализованных систем примерно равноправны, каждый из элементов значимо взаимодействует с другими, состояния элементов взаимно обусловлены. Это также хорошо согласуется с формирующимися естественным образом (в процессе эволюции и самоорганизации живых систем) организационными формами и связями в системах.
Частными случаями децентрализованных объектов в теории автоматического управления являются системы, построенные в соответствие с акторной моделью [14]. В этой модели акторы представляют собой универсальные примитивы параллельного исполнения, реализующие обработку, хранение и асинхронный обмен сообщениями. Акторная модель построения систем имеет большой потенциал реализации быстродействующих систем с большим объемом распределенных (параллельных) вычислений, в том числе для децентрализованных и асинхронных систем искусственного интеллекта [15].
Для технических систем управления в реальном времени движением перспективным является использование память-центрической архитектуры [16], при которой данные в процессе вычислений не перемещаются между процессором и памятью, а остаются в памяти, в которую интегрируется процессор.
Заключение
На основе проведенных исследований можно сделать следующие основные выводы:
1. Существует проблема реализуемости управления сложными системами, заключающаяся в необходимости обеспечить достаточное быстродействие системы управления, при которой весь необходимый комплекс операций управления укладывается в цикл управления, продолжительность которого определяется требованиями к функционированию этой системы.
2. По мере роста сложности объекта управления сокращается допустимая длительность цикла управления и растут требования к быстродействию системы управления. Указанный рост быстродействия примерно пропорционален квадрату сложности объекта.
3. Проблема реализуемости управления обусловлена существованием связи между сложностью объекта, удерживаемого в устойчивом состоянии за счет внешнего воздействия, и скоростью роста его энтропии в интервалах между управляющими воздействиями.
4. Управление объектом в рамках теоретически-информационного представления его сложности может интерпретироваться как процесс сохранения его устойчивости посредством противодействия самопроизвольному росту энтропии.
5. Согласно общей теории систем, существуют два основных варианта повышения устойчивости сложной системы: за счет моноцентризма архитектуры с центральным элементом, взаимодействие которого с другими элементами имеет эгрессионный характер, либо за счет увеличения числа связей в объекте.
6. Требование быстродействия удовлетворяется только при использовании варианта обеспечения устойчивости на основе увеличения числа связей в системе. На практике данный вариант реализуется в виде децентрализованной системы, в которой основная часть выполняемых элементами системы операций генерируется автономно, без участия (или с минимальным участием) центрального элемента.
Библиография
1. Винер Н. Кибернетика и общество. М.: «Издательство иностранной литературы», 1958. 200 с.
2. Шеннон К. Работы по теории информации и кибернетике. М.: «Издательство иностранной литературы», 1963. 830 с. С. 243-332.
3. Зеленский А.А., Кузнецов А.П., Илюхин Ю.В., Грибков А.А. Реализуемость управления движением промышленных роботов, станков с ЧПУ и мехатронных систем. Часть 1 // Вестник машиностроения, 2022, № 11. С. 43-51.
4. Уемов А.И. Системный подход и общая теория систем. М.: «Мысль», 1978. 272 с.
5. Эшби У.Р. Теоретико-множественный подход к механизму и гомеостазису / в сборн. «Исследования по общей теории систем. Сборник переводов». М.: «Прогресс», 1969. 520 с. С. 398-441.
6. Зеленский А.А., Кузнецов А.П., Илюхин Ю.В., Грибков А.А. Реализуемость управления движением промышленных роботов, станков с ЧПУ и мехатронных систем. Часть 2 // Вестник машиностроения, 2023, №3. С. 213-220.
7. Аверин Г.В., Звягинцева А.В. О взаимосвязи статистической и информационной энтропии при описании состояний сложных систем // Научные ведомости БелГУ, Серия "Математика. Физика", 2016, Выпуск 44, №20 (241). С. 105-116.
8. Дулесов А.С., Семенова М.Ю., Хрусталев В.И. Свойства энтропии технической системы // Фундаментальные исследования, 2011, № 8 (часть 3). С. 631-636.
9. Грибков А.А. Определение вторичных законов и свойств объектов в общей теории систем. Часть 1. Методологический подход на основе классификации объектов // Контекст и рефлексия: философия о мире и человеке, 2023, том 12, №5-6A. С. 17-30.
10. Богданов А.А. Тектология. Всеобщая организационная наука. М.: «Экономика», 1989.
11. Никонова А.А. О принципе ингрессии в системном мире А.А. Богданова, или нет пророка в своем отечестве // Хроноэкономика, 2019, №7(20). С. 32-40.
12. Hitchins D. Putting Systems to Work. New York: Wiley, 1993. 342 p.
13. Ильясов Б.Г., Саитова Г.А. Исследование многосвязных систем автоматического управления сложными динамическими объектами на основе парадигмы Б. Н. Петрова // Проблемы управления, 2021, вып. 3. С. 3-15.
14. Rinaldi L., Torquati M., Mencagli G., Danelutto M., Menga T. Accelerating Actor-based Applications with Parallel Patterns // Proceedings of the 27th Euromicro International Conference on Parallel, Distributed and Network-Based Processing, 2019. Pavia, Italy, 13-15 Feb. 2019.
15. Морозов С.М., Куприянов М.С. Акторная модель построения нейро-нечетких систем // Изв. СПбГЭТУ «ЛЭТИ», 2022, т. 15, № 5/6. С. 22-31.
16. Каляев И., Заборовский В. Искусственный интеллект: от метафоры к техническим решениям // Control Engineering Россия, 2019, № 5 (83), с. 26-3.
References
1. Wiener, N. (1958). Cybernetics and Society. Moscow: "Publishing House of Foreign Literature".
2. Shannon, K. (1963). Works on Information Theory and Cybernetics, 243-332. Moscow: Publishing House of Foreign Literature.
3. Zelenskiy, A.A., Kuznetsov, A.P., Ilyukhin, Yu.V., & Gribkov, A.A. (2022). Realizability of motion control of industrial robots, CNC machines and mechatronic systems. Part 1. Machine Building Vestnik, 11, 43-51.
4. Uemov, A.I. (1978). System Approach and General Theory of Systems. Moscow: Mysl.
5. Ashby, W.R. (1969). Theoretical-multiple approach to mechanism and homeostasis. In "Studies on the general theory of systems. Collection of translations", 398-441. Moscow: Progress.
6. Zelensky, A.A., Kuznetsov, A.P., Ilyukhin, Yu.V.V., & Gribkov, A.A. (2023). Realizability of motion control of industrial robots, CNC machines and mechatronic systems. Part 2. Machine Building Vestnik, 3, 213-220.
7. Averin G.V. Zvyagintseva A.V. (2016). On the relationship between statistical and information entropy in describing the states of complex systems. Scientific Vedomosti BelSU, Series "Mathematics. Physics". Issue 44, 20(241), 105-116.
8. Dulesov, A.S., Semenova, M.Yu., & Khrustalev, V.I. (2011). Entropy properties of a technical system. Fundamental Research, 8(part 3), 631-636.
9. Gribkov A.A. (2023). Definition of the secondary laws and properties of objects in the general theory of systems. Part 1. Methodological Approach based on Object Classification. Context and Reflexion: Philosophy about the World and Man, 12(5-6A), 17-30.
10. Bogdanov, A.A. (1989). Tectology. General organizational science. Moscow: Economy.
11. Nikonova, A.A. (2019). On the principle of ingression in the system world of A.A. Bogdanov, or there is no prophet in his fatherland. Chronoeconomics, 7(20), 32-40.
12. Hitchins, D. (1993). Putting Systems to Work. New York: Wiley.
13. Ilyasov, B.G., & Saitova, G.A. (2021). Research of Multilink Systems of Automatic Control of Complex Dynamic Objects on the Basis of B.N. Petrov Paradigm. Problems of Control. Issue 3, 3-15.
14. Rinaldi, L., Torquati, M., Mencagli, G., Danelutto, M., & Menga, T. (2019). Accelerating Actor-based Applications with Parallel Patterns. Proceedings of the 27th Euromicro International Conference on Parallel, Distributed and Network-Based Processing. Pavia, Italy, 13-15 Feb. 2019.
15. Morozov, S.M M., & Kupriyanov, M.S. (2022). Actor model of neuro-fuzzy systems construction. Izvestia SPbGETU "LETI", 15(5/6), 22-31.
16. Kalyaev, I., & Zaborovsky, V. (2019). Artificial Intelligence: from metaphor to technical solutions. Control Engineering Russia, 5(83), 26-3.
Результаты процедуры рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
Авторы рецензируемой статьи указывают на сложность проблемы «формализации» понятия «управление», причём под «сложностью» они понимают отсутствие на сегодняшний день определения этого понятия, которое охватывало бы все частные случаи управления в отдельных системах. Заметим со своей стороны, что трудность (или даже невозможность) дать подобное определения, прежде всего, связана с тем, что речь идёт именно об общем понятии, используемом в языках описания различных по своей природе систем, и никто из исследователей, работающих в разных областях науки, не давал своим коллегам, представляющим другие научные дисциплины, оснований предполагать, что концептуальное наполнение одного и того же термина всегда эквивалентно во всех описаниях, использующих этот термин. Авторы, однако, отталкиваясь от «реалистических» представлений о природе понятий, пытаются всё же дать подобное универсальное, как они считают, определение. Вряд ли формат рецензии предполагает детальное обсуждение его сильных и слабых сторон, заметим лишь, что его значимость может быть проверена только в процессе корректировки содержания тех научных дисциплин, в которых реально «работает» понятие управления. Далее, думается, следует скорректировать название статьи, можно было бы предложить вариант «Онтологические аспекты проблемы…»; примут авторы этот вариант или предложат какой-то другой, но саму проблему как «онтологическую» обозначать не следует. Дело в том, что онтология – это область, раздел философии, то есть характеристика более высокой степени общности, чем какая-то отдельная тема из этой области. Представленная в названии статьи формулировка аналогична, например, такой формулировке, как «Философская проблема свободы воли», которая, разумеется, является «философской», но только нет никакой необходимости указывать на эту размещающуюся на другом уровне обобщения характеристику, поскольку она уже содержится в самом понятии данной проблемы. Кажется, впрочем, что сами авторы не вполне понимают и смысл слова «онтология», поскольку в их пояснениях (которые несколько раз повторяются) «онтологичность» связана с «существованием в бытии связи между сложностью объекта … и скоростью роста его энтропии». Конечно, «существование в бытии» и само по себе – недопустимое выражение, но к онтологии соотношение сложности систем и роста энтропии в них вообще отношения не имеет, онтология имеет дело с соотношением общих понятий (концептов) и реальности вне мысли (языка), о чём выше как раз и говорилось. Поэтому содержание статьи не пострадает, если авторы вообще откажутся от этого понятия, во всяком случае, не будут выносить его в название. Отметим также, что текст нуждается в существенном редактировании, например, в устранении множества пунктуационных ошибок («сложности в понимании обусловлены существованием наряду с внешним управлением, также самоуправления», - зачем запятая?; напротив, в «на первый взгляд производительность…», «согласно А.И. Уемову существуют…», «согласно общей теории систем существуют…», и т.п. запятые нужны). Несмотря на высказанные замечания, следует признать, что в статье имеется оригинальное содержание, она может быть интересна читателям, поэтому после исправления орфографических ошибок и стилистических погрешностей («существование в бытии» и т.п.) она может быть напечатана в научном журнале.
|











