|
Кибернетика и программирование
Правильная ссылка на статью:
Тепловодский А.В.
Алгоритм моделирования движения авиационных управляемых ракет
// Кибернетика и программирование.
2017. № 1.
С. 48-60.
DOI: 10.7256/2306-4196.2017.1.20850 URL: https://nbpublish.com/library_read_article.php?id=20850
Алгоритм моделирования движения авиационных управляемых ракет
Тепловодский Александр Владимирович
начальник отделения Государственного лётно-испытательного центра им. В.П. Чкалова
416507, Россия, Астраханская область, г. Ахтубинск, 929 ГЛИЦ ВВС
Teplovodskii Aleksandr Vladimirovich
Head of the Research and Development Department, Chkalov State Flight Research Center
416507, Russia, Astrakhanskaya oblast', g. Akhtubinsk, 929 GLITS VVS

|
planetnaya3@gmail.com
|
|
 |
|
DOI: 10.7256/2306-4196.2017.1.20850
Дата направления статьи в редакцию:
25-10-2016
Дата публикации:
22-03-2017
Аннотация:
Предметом исследования является разработка алгоритмического обеспечения построения методик испытаний авиационных управляемых ракет, основанного на интегрировании дифференциальных уравнений в форме Коши, принятых для математического описания движения летательных аппаратов, являющийся базой для моделирования движения авиационных управляемых ракет.Предложен подход к алгоритмизации траектории полета авиационных управляемых ракет, который целесообразно использовать при разработке методик исследований и испытаний авиационных управляемых ракет с применением моделирующих комплексов, позволяющих достоверно определить и оценить соответствие характеристик движения авиационных управляемых ракет заданным тактико-техническим требованиям. Методология исследования основана на методах математического моделирования, оптимального управления, вычислительной математики, дифференциального и интегрального исчисления. Основным результатом проведенного исследования является сформированный базовый алгоритм движения для простейшей модели авиационной управляемой ракеты с учетом воздействия ветровых возмущений. Разработанный алгоритм допускает усложнение путем включения алгоритмов наведения ракеты и алгоритмов управления учитывающих угловое движение ракеты относительно центра масс, динамику датчиков информации и динамику рулевых приводов ракеты.
Ключевые слова:
авиационная управляемая ракета, моделирование полета, моделирование динамического движения, вычислительный эксперимент, математическое моделирование, испытания авиационной техники, испытания летательных аппаратов, авиационная кибернетика, вычислительная математика, оптимальное управление
Abstract: The subject of the study is to develop algorithmic for test methods for aircraft guided missiles, based on the integration of differential equations in the Cauchy form adopted for the mathematical description of the movement of aircraft, which is the basis for modeling the motion of aircraft-guided missiles. The author suggests an approach to algorithmization of the flight path of aircraft guided missiles, which should be used in the development of methods of research and testing of aircraft guided missiles using modeling systems that allow reliably determining and assessing the compliance of the motion characteristics of the aviation guided rockets specified tactical and technical requirements. The research methodology is based on the methods of mathematical modeling, optimal control, computational mathematics, differential and integral calculus. The main result of the study is formed by the basic movement algorithm for simple model of aircraft guided missile based on the impact of wind disturbances. The algorithm allows increasing the complexity by including missile guidance algorithms and control algorithms that take into account the angular movement of the rocket center of mass, dynamic data sensors and steering dynamics rocket drives.
Keywords: aircraft guided missile, flight simulation, dynamic motion simulation, computer experiment, math modeling, testing of aeronautical engineering, testing of aircraft, aviation cybernetics, computational mathematics, optimal control
В настоящее время при разработке вооружения для перспективных авиационных комплексов наблюдается постоянное увеличение сложности аппаратуры создаваемых образцов и повышение стоимости летных испытаний [1, 2]. Одновременно повышаются требования к эффективности и сокращению сроков проведения испытаний [3]. В связи с этим перед испытателями ставится задача уменьшения материальных средств, затрачиваемых на проведение летных экспериментов.
Одним из наиболее гибких и эффективных способов экономии материальных средств является использование при проведении испытаний методов математического и полунатурного моделирования [4-6]. Моделирование является обязательным элементом в процессе создания и испытаний всех опытных и модернизированных (модифицированных) образцов авиационного вооружения, и в первую очередь это касается наиболее конструктивно сложных и материально затратных в производстве авиационных управляемых ракет (далее - АУР) [7, 8].
Основной задачей моделирования полета АУР при проведении испытаний является определение и оценка характеристик движения на соответствие заданным тактико-техническим требованиям [7]. Разработка методического обеспечения испытаний методами требует от исследователя знания законов движения ЛА с учётом действующих сил и моментов, а также умения построения алгоритмов управления [9-12].
Однако алгоритмическое обеспечение построения методик испытаний, адекватное поставленной задаче, отсутствует, что определяет актуальность исследования.
Для решения поставленной задачи разработан алгоритм расчета траектории АУР, основанный на интегрировании дифференциальных уравнений в форме Коши, принятых для математического описания движения летательных аппаратов (ЛА), являющийся базой для моделирования движения АУР.
Новизна предложенного алгоритма заключается в том, что в результате обобщения научных трудов в области расчетов траектории ЛА [7, 8], теории управления ЛА [13-16], динамики движения ЛА [17-22], математического моделирования и алгоритмизации [23-26], автором предложен подход к алгоритмизации траектории полета АУР, который было бы целесообразно использовать при разработке методик исследований и испытаний АУР с применением моделирования.
Расчетная схема алгоритма моделирования движения авиационных управляемых ракет
В теории движения траектория АУР как ЛА рассматривается как линия движения центра масс АУР от начальной точки (с момента пуска с самолета-носителя) до конечной (точки встречи с целью).
Разработка алгоритма движения АУР формулируется как задача расчета траектории [13, 14]. Будем считать, что характеристики движения АУР известны, могут быть рассчитаны силы и моменты сил, действующих на АУР в процессе полета. Зададим условие, что движение АУР описывается математической моделью (ММ), представляющей собой известную систему дифференциальных уравнений при заданных начальных условиях, известен также закон управления.
Расчет траектории движения АУР основывается на решении дифференциальных уравнений (ДУ) при заданных начальных условиях – интегрировании ДУ в форме Коши. В результате решения мы можем получить все основные характеристики движения АУР: координаты центра масс, по которым строится траектория АУР, а также скорость и углы, определяющие ее положение в пространстве.
Расчеты необходимо проводить в несколько этапов. Для начала применим расчеты для простых ММ динамики движения АУР и получим практически идеальную траекторию движения. Затем усложним модели, учитывая при их разработке, например, вращение Земли [15].
Обозначим комплекс ДУ, которыми будем описывать указанные выше задачи, как ММ движения АУР на различных этапах их полета. Одними из наиболее значимых требований к таким ММ, кроме их адекватности и достаточной для практического применения точности, будем считать простоту и понятность.
Помимо этого, применение упрощенных ММ движения АУР, как показал опыт проведения испытаний, позволяет обеспечить снижение применения сложных математических методов и алгоритмов при создании таких моделей.
В дальнейшем из этого следует простота их реализации на вычислительных средствах при проведении испытаний, чтобы их можно было бы использовать для проведения экспериментов даже не сильно «подкованному» в алгоритмизации и математике исследователю.
Предложим в исследовании использование упрощенных ДУ полета АУР, описывающих движение в пространстве центра масс ракеты [14-17].
При разработке алгоритма моделирования движения АУР будем использовать ММ управляемого движения ЛА, записанную в векторной форме [18, 21, 22]:

где:  – вектор фазовых координат АУР; – вектор фазовых координат АУР;
 – управляющий вектор; – управляющий вектор;
 – вектор-функция своих аргументов; – вектор-функция своих аргументов;
 – интервал времени – интервал времени  , на котором выполняется полет АУР. , на котором выполняется полет АУР.
Для управляющего вектора примем следующие ограничения вида:

Для уменьшения сложности решения задачи выбора вектора  , используем упрощенные ММ движения ЦМ АУР [17, 18, 21], описанные в следующем виде: , используем упрощенные ММ движения ЦМ АУР [17, 18, 21], описанные в следующем виде:







где:  – скорость АУР в момент времени – скорость АУР в момент времени 
 и и  – углы наклона и поворота траектории АУР в – углы наклона и поворота траектории АУР в
этот момент времени;
 – координаты АУР в нормальной – координаты АУР в нормальной
земной системе координат.
Сопоставив (1), (3) и (4) получаем, что фазовый вектор АУР состоит из координат  , а исходные условия для этой системы ДУ представлены в виде: , а исходные условия для этой системы ДУ представлены в виде:


При моделировании полета АУР учтем влияние произвольных ветровых возмущений. В качестве общей количественной характеристики действующего ветра будем рассматривать вектор его скорости  . Компоненты этого вектора описывают составляющие скорости ветра, действующие в направлении соответствующих осей земной системы координат [17]. . Компоненты этого вектора описывают составляющие скорости ветра, действующие в направлении соответствующих осей земной системы координат [17].
В общем случае влияния произвольных ветровых возмущений, описываемых вектором  , на вектор фазовых координат , на вектор фазовых координат  общей ММ АУР (3)-(6) будем описывать, преобразовав кинематические уравнения ее движения (4) к виду: общей ММ АУР (3)-(6) будем описывать, преобразовав кинематические уравнения ее движения (4) к виду:




После проведения интегрирования (7) при заданных зависимостях  от времени t мы получаем возмущенную траекторию координат х, у, z. движения АУР в зависимости от t. от времени t мы получаем возмущенную траекторию координат х, у, z. движения АУР в зависимости от t.
Для формирования зависимостей фазовых координат  от значений компонент вектора скорости ветра от значений компонент вектора скорости ветра  используем графическую схему, изображенную на рисунке 1. используем графическую схему, изображенную на рисунке 1.
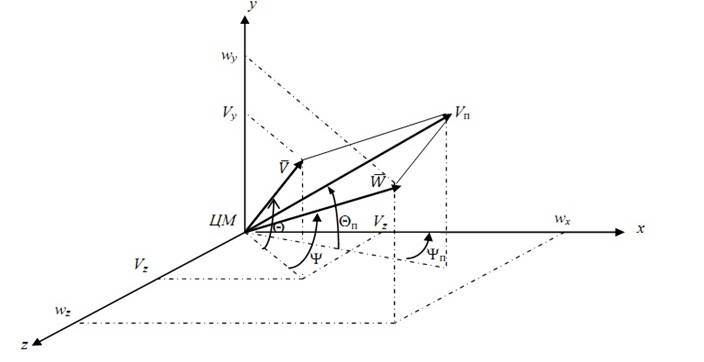
Рисунок 1. Расчетная схема формирования зависимостей фазовых координат
Представленные на рисунке 1 векторы движения АУР: путевая  и воздушная и воздушная  скорости, ветер скорости, ветер  , определены в земной системе координат (ЗСК) с началом в ЦМ АУР. Составные элементы примем за положительные величины и рассмотрим произвольную в пространстве. , определены в земной системе координат (ЗСК) с началом в ЦМ АУР. Составные элементы примем за положительные величины и рассмотрим произвольную в пространстве.
На рисунке 1 представлены углы  и и  , определяющие ориентацию в пространстве и скоростей АУР. , определяющие ориентацию в пространстве и скоростей АУР.
Получим общее выражение для вычисления Vп при заданных невозмущенных значениях фазовых координат  и характеристиках ветра и характеристиках ветра  [17, 24]. [17, 24].
Составляющие элементы вектора воздушной скорости АУР  связаны с производными ее координат следующими отношениями: связаны с производными ее координат следующими отношениями:

Из этого следует, что уравнения (4) можно сформировать в виде:



Исходя из рисунка 1, применим правило сложения векторов. Представим полученный вектор путевой скорости АУР  в координатной форме: в координатной форме:

Получим модуль вектора путевой скорости по формуле:

Подставим в правую часть формулы значения из уравнений (8):

Из полученного выражения извлечем корень и сформируем соотношение, позволяющее вычислять значение  при произвольном направлении вектора ветра в пространстве: при произвольном направлении вектора ветра в пространстве:


Далее, построим путевой угол  , получаемый из зависимости угла наклона траектории АУР от невозмущенных значений и составных элементов . , получаемый из зависимости угла наклона траектории АУР от невозмущенных значений и составных элементов .
Из второго равенства выражения (8), следует, что:
Следовательно, для путевой скорости АУР значение можно определить как:

Применив соотношения (8-10), получим следующее выражение:

Из него следует, что при полном отсутствии ветра 
Построим такую же зависимость для путевого угла  поворота траектории АУР при воздействии на него ветра, т.е. поворота траектории АУР при воздействии на него ветра, т.е.  [17]. [17].
В соответствии с геометрической схемой на рисунке 1 значение угла  определяется соотношением: определяется соотношением:
Применяя составные элементы вектора  (9), получаем значение формулы путевого угла: (9), получаем значение формулы путевого угла:
Используя соотношения  и и  , из (8) получаем следующую формулу: , из (8) получаем следующую формулу:

Разработаем алгоритм моделирования движения АУР в неспокойной атмосфере за промежуток времени от  до до с применением выражений общей модели движения АУР (3-6) при известных векторе управления и векторе скорости ветра с применением выражений общей модели движения АУР (3-6) при известных векторе управления и векторе скорости ветра  [17, 19, 25-28]. [17, 19, 25-28].
В вычислительную схему моделирования движения АУР, разработанную на основе соотношений (3-4), добавим следующие ДУ:


Полученные в определенный промежуток времени значения  вместе с компонентами вектора скорости ветра при проведении интегрирования соотношений (14-15) применяются в выражениях (10), (12) и (13). При этом проводится вычисление текущих возмущенных значений вместе с компонентами вектора скорости ветра при проведении интегрирования соотношений (14-15) применяются в выражениях (10), (12) и (13). При этом проводится вычисление текущих возмущенных значений   и и  полета АУР. полета АУР.
Вместе с тем, отметим, что интегрирование соотношений (14) выполняется начальных условиях, которые определяются с помощью включения в выражения (10), (12) и (13) значений из правых частей зависимостей (5), а начальные условия для соотношения (15) берутся из зависимостей (6). Далее получаем траекторию движения АУР за счет интегрирования кинематических уравнений вида и решения задачи Коши [17, 18]:



Начальные условия определяем как:


При изменении времени движения АУР на величину  получаем следующие выражения для параметров траектории движения АУР: получаем следующие выражения для параметров траектории движения АУР:










 ; ;
 ; ;

Решения полученных уравнений (16-22) также включаем в алгоритм моделирования траектории движения АУР.
В результате проведения математических операций исходная модель траектории движения АУР была преобразована для того, чтобы был проведен ее количественный анализ в компьютерном эксперименте. Данные преобразования ММ должны привести к созданию такого алгоритма, который можно было бы реализовать в виде программных средств на компьютере [24].
Блок-схема алгоритма моделирования движения авиационных управляемых ракет
При программной реализации разрабатываемой блок-схемы должны применяться соответствующие математические методы решения систем ДУ, приведенных в данном исследовании, а начальные условия моделирования задаются выражениями (5) и (6).
При формировании блок-схемы алгоритма для численного интегрирования уравнений (9)-(11) используется расчетная схема метода Эйлера для решения задачи Коши, часто применяемая для моделирования движения ЛА на некотором интервале времени 
 ; ;
 ; ;

 ; ;

где:  – шаг интегрирования, определяемый как: – шаг интегрирования, определяемый как: 
 – число узлов сетки моментов времени – число узлов сетки моментов времени  , в которых вычисляются значения интегральных кривых функций , в которых вычисляются значения интегральных кривых функций   . .
Блок-схема алгоритма приведена на рисунке 2.
При разработке составных частей и обозначений блок-схемы, параметр  обозначает размер шага интегрирования . Также известно, что обозначает размер шага интегрирования . Также известно, что  , а функции , а функции  тождественны правым частям уравнений (14)-(16). Символ «:=» - операция присвоения. тождественны правым частям уравнений (14)-(16). Символ «:=» - операция присвоения.
В правых частях выражений, входящих в блок 7, применяются количественные значения  , вычисленные в блоке 5 в момент времени , вычисленные в блоке 5 в момент времени  . При . При  = = в блоке 7 используются значения в блоке 7 используются значения  и и  из блоков 2 и 3. из блоков 2 и 3.
Алгоритм расчёта траектории для конкретной АУР также имеет блочную структуру и должен содержать большое количество условных переходов. Для различных условий применения расчет требуемых показателей осуществляется по различным зависимостям и может иметь реальную точность.
По этой причине оценку алгоритмов расчета траектории целесообразно осуществлять для отдельных областей условий эксплуатации, что обеспечит дифференцированный характер этой оценки в соответствии с важностью возлагаемых различных задач на АУР [27, 28].
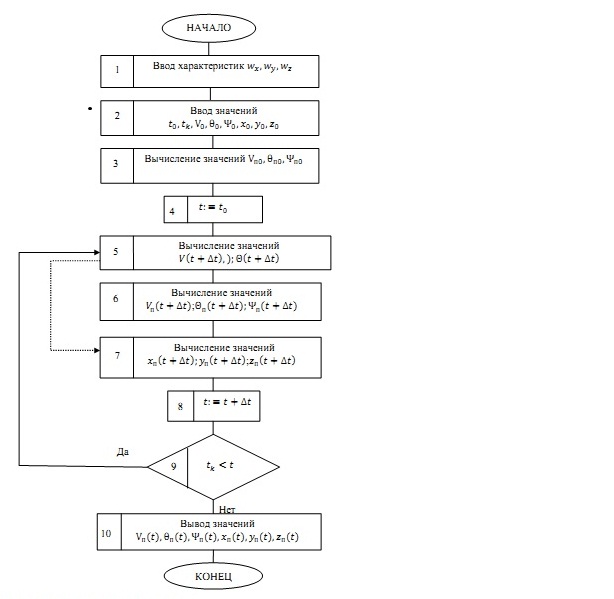
Рисунок 2. Блок-схема алгоритма расчёта траектории АУР
Разбиение всего диапазона областей применения на отдельные области необходимо выполнять в соответствии с блочной структурой алгоритмов расчета траектории и условиями выполнения расчетов по математическим соотношениям того или иного из этих блоков. Кроме того эти условия могут определяться значениями некоторых параметров-переменных, достигающих определенных в алгоритме пороговых значений, которые характеризуют качественные изменения условий применения ЛА.
* * *
В исследовании было описано формирование базового алгоритма движения для простейшей модели АУР с учетом воздействия ветровых возмущений. Чтобы быть реализованным на средствах ЭВМ, на основе математической модели строится моделирующий алгоритм, который описывает структуру и логику взаимодействия элементов в системе.
Для разработки более сложных алгоритмов в задачу должны включаться сначала алгоритмы наведения, а на последующих этапах решаться задачи формирования закона управления и построения системы управления, учитывающее угловое движение АУР относительно центра масс, динамику датчиков информации, динамику рулевых приводов.
В дальнейшем программная реализация моделирующего алгоритма воплощается в виде имитационной модели, которая с применением программно-аппаратных средств моделирования используется для проведения вычислительных экспериментов.
Результаты исследования целесообразно использовать при разработке математических моделей вновь создаваемых образцов АУР в качестве базовой основы с постепенным наращиванием структурных элементов, что позволит разработчику сократить сроки, затрачиваемые на создание программного обеспечения для проведения моделирования, на всех этапах их разработки.
Библиография
1. Есев А.А., Солдатов А.С., Пушкарский Е.Ю. Метод квалиметрии сложных технических систем при проведении их испытаний // Научно-методический электронный журнал Концепт. 2013. Т. 4. С. 1191-1195.
2. Буравлев А.И. Проблемы технического обеспечения военной авиации в современных условиях // Научные чтения по авиации, посвященные памяти Н.Е. Жуковского. 2016. № 4. С. 22-28.
3. Метод поддержки принятия решений по управлению ресурсами при испытаниях авиационной техники / Л.В.Коломиец [и др.] // Информационно-измерительные и управляющие системы. 2010. Т. 8. № 5. С. 38-40.
4. Кукушкин Ю.А., Богомолов А.В., Ушаков И.Б. Математическое обеспечение оценивания состояния материальных систем // Информационные технологии. 2004. № 7 (приложение). 32 с.
5. Есев А.А., Ткачук А.В., Зыкин А.П. Методическое обеспечение исследования технического уровня образцов вооружения и военной техники // Двойные технологии. 2014. № 1 (66). С. 59-64.
6. Корсун О.Н., Харьков В.П., Гребнев О.Н. Исследование погрешностей идентификации аэродинамических коэффициентов беспилотного летательного аппарата // Научные чтения по авиации, посвященные памяти Н.Е. Жуковского. 2013. № 1. С. 465-469.
7. Основы формирования облика систем управления авиационного ракетного вооружения / Под ред. В.Н.Трусова. М.: Издательско-торговая корпорация «Дашков и Ко», 2012. 176 с.
8. Математическое моделирование в задачах натурных испытаний ракетной техники. СПб.: Изд-во ВВМ, 2015. 121 c.
9. Миронова М.М., Кулифеев Ю.Б. Программный комплекс моделирования режимов управления горизонтальным полетом беспилотного летательного аппарата // Программные системы и вычислительные методы. 2015. № 3. С. 293-310.
10. Макаренко В.Г., Подорожняк А.А., Рудаков С.В., Богомолов А.В. Инерциально-спутниковая навигационная система управления транспортными средствами // Проблемы управления. 2007. № 1. С. 64-71.
11. Харьков В.П. Устойчивые алгоритмы адаптивного управления динамическими системами // Научные чтения по авиации, посвященные памяти Н.Е. Жуковского. 2014. № 2. С. 350-358.
12. Кулифеев Ю.Б., Миронова М.М. Моделирование автоматического управления скоростью и высотой полета беспилотного летательного аппарата // Проблемы безопасности полетов. 2016. № 5. С. 25-40.
13. Шалыгин А.С., Санников В.А., Толпегин О.А., Петрова И.Л. Автоматизация расчета траекторий летательных аппаратов. СПб.: БГТУ, 2008. 141 с.
14. Санников В.А., Юрескул А.Г. Основные принципы расчета траектории летательных аппаратов. СПб., 2008. 118 с.
15. Сихарулидзе Ю.Г. Баллистика и наведение летательных аппаратов /. М.: БИНОМ. Лаборатория знаний, 2013. 407 с.
16. Харьков В.П. Построение оптимальных алгоритмов управления нелинейными динамическими системами // Инновации на основе информационных и коммуникационных технологий. 2013. Т. 1. С. 278-281.
17. Моисеев В.С. Прикладная теория управления беспилотными летательными аппаратами: монография. Казань: ГБУ «Республиканский центр мониторинга качества образования», 2013. 768 с. 17. Основы алгоритмизации и программирования.: М.: ФОРУМ, 2008. 432 с.
18. Новоселов А.С., Болонкин В.Е., Чинаев П.И., Юрьев А.Н. Системы адаптивного управления летательными аппаратами. М.: Машиностроение, 1987. 280 с.
19. Макаренко В.Г., Богомолов А.В., Рудаков С.В., Подорожняк А.А. Технология построения инерциально-спутниковой навигационной системы управления транспортными средствами с нейросетевой оптимизацией состава вектора измерений // Мехатроника, автоматизация, управление. 2007. № 1. С. 39-44.
20. Харьков В.П., Корсун O.H., Гребнев O.H. Синтез управления беспилотным летательным аппаратом на основе метода обратных задач динамики и параметрической идентификации // Вестник компьютерных и информационных технологий. 2010. № 12. С. 18-23.
21. Куршев Н.В., Кожевников Ю.В. Оптимальные задачи динамики полета. Казань: Изд-во КГТУ им. А.Н. Туполева, 2010. 326 с.
22. Лебедев А.А., Чернобровкин Л.С. Динамика полета беспилотных летательных аппаратов. М.: Машиностроение, 1973. 616 с.
23. Санников В.А., Юрескул А.Г. Основные принципы построения моделей движения летательных аппаратов. СПб., 2008. 135 с.
24. Кубланов М.С. Математическое моделирование задач летной эксплуатации воздушных судов на взлете и посадке. М.: РИО МГТУ ГА, 2013. 270 с.
25. Буравлев А.И., Горчица Г.И. Принцип внешнего дополнения и его применение при анализе эффективности сложных систем // Информационно-измерительные и управляющие системы. 2008. Т. 6. № 7. С. 14-17.
26. Рудаков И.С., Рудаков С.В., Богомолов А.В. Методика идентификации вида закона распределения параметров при проведения контроля состояния сложных систем // Информационно-измерительные и управляющие системы. 2007. Т. 5. № 1. С. 66-72.
27. Стивенс Р. Алгоритмы. Теория и практическое применения /. М.: Издательство «Э», 2016. 544 с.
28. Харьков В.П., Исаев С.А. Безопасное управление вектором скорости полёта БЛА на основе обратных задач динамики // Научные чтения по авиации, посвященные памяти Н.Е. Жуковского. 2016. № 4. С. 243-248.
References
1. Esev A.A., Soldatov A.S., Pushkarskii E.Yu. Metod kvalimetrii slozhnykh tekhnicheskikh sistem pri provedenii ikh ispytanii // Nauchno-metodicheskii elektronnyi zhurnal Kontsept. 2013. T. 4. S. 1191-1195.
2. Buravlev A.I. Problemy tekhnicheskogo obespecheniya voennoi aviatsii v sovremennykh usloviyakh // Nauchnye chteniya po aviatsii, posvyashchennye pamyati N.E. Zhukovskogo. 2016. № 4. S. 22-28.
3. Metod podderzhki prinyatiya reshenii po upravleniyu resursami pri ispytaniyakh aviatsionnoi tekhniki / L.V.Kolomiets [i dr.] // Informatsionno-izmeritel'nye i upravlyayushchie sistemy. 2010. T. 8. № 5. S. 38-40.
4. Kukushkin Yu.A., Bogomolov A.V., Ushakov I.B. Matematicheskoe obespechenie otsenivaniya sostoyaniya material'nykh sistem // Informatsionnye tekhnologii. 2004. № 7 (prilozhenie). 32 s.
5. Esev A.A., Tkachuk A.V., Zykin A.P. Metodicheskoe obespechenie issledovaniya tekhnicheskogo urovnya obraztsov vooruzheniya i voennoi tekhniki // Dvoinye tekhnologii. 2014. № 1 (66). S. 59-64.
6. Korsun O.N., Khar'kov V.P., Grebnev O.N. Issledovanie pogreshnostei identifikatsii aerodinamicheskikh koeffitsientov bespilotnogo letatel'nogo apparata // Nauchnye chteniya po aviatsii, posvyashchennye pamyati N.E. Zhukovskogo. 2013. № 1. S. 465-469.
7. Osnovy formirovaniya oblika sistem upravleniya aviatsionnogo raketnogo vooruzheniya / Pod red. V.N.Trusova. M.: Izdatel'sko-torgovaya korporatsiya «Dashkov i Ko», 2012. 176 s.
8. Matematicheskoe modelirovanie v zadachakh naturnykh ispytanii raketnoi tekhniki. SPb.: Izd-vo VVM, 2015. 121 c.
9. Mironova M.M., Kulifeev Yu.B. Programmnyi kompleks modelirovaniya rezhimov upravleniya gorizontal'nym poletom bespilotnogo letatel'nogo apparata // Programmnye sistemy i vychislitel'nye metody. 2015. № 3. S. 293-310.
10. Makarenko V.G., Podorozhnyak A.A., Rudakov S.V., Bogomolov A.V. Inertsial'no-sputnikovaya navigatsionnaya sistema upravleniya transportnymi sredstvami // Problemy upravleniya. 2007. № 1. S. 64-71.
11. Khar'kov V.P. Ustoichivye algoritmy adaptivnogo upravleniya dinamicheskimi sistemami // Nauchnye chteniya po aviatsii, posvyashchennye pamyati N.E. Zhukovskogo. 2014. № 2. S. 350-358.
12. Kulifeev Yu.B., Mironova M.M. Modelirovanie avtomaticheskogo upravleniya skorost'yu i vysotoi poleta bespilotnogo letatel'nogo apparata // Problemy bezopasnosti poletov. 2016. № 5. S. 25-40.
13. Shalygin A.S., Sannikov V.A., Tolpegin O.A., Petrova I.L. Avtomatizatsiya rascheta traektorii letatel'nykh apparatov. SPb.: BGTU, 2008. 141 s.
14. Sannikov V.A., Yureskul A.G. Osnovnye printsipy rascheta traektorii letatel'nykh apparatov. SPb., 2008. 118 s.
15. Sikharulidze Yu.G. Ballistika i navedenie letatel'nykh apparatov /. M.: BINOM. Laboratoriya znanii, 2013. 407 s.
16. Khar'kov V.P. Postroenie optimal'nykh algoritmov upravleniya nelineinymi dinamicheskimi sistemami // Innovatsii na osnove informatsionnykh i kommunikatsionnykh tekhnologii. 2013. T. 1. S. 278-281.
17. Moiseev V.S. Prikladnaya teoriya upravleniya bespilotnymi letatel'nymi apparatami: monografiya. Kazan': GBU «Respublikanskii tsentr monitoringa kachestva obrazovaniya», 2013. 768 s. 17. Osnovy algoritmizatsii i programmirovaniya.: M.: FORUM, 2008. 432 s.
18. Novoselov A.S., Bolonkin V.E., Chinaev P.I., Yur'ev A.N. Sistemy adaptivnogo upravleniya letatel'nymi apparatami. M.: Mashinostroenie, 1987. 280 s.
19. Makarenko V.G., Bogomolov A.V., Rudakov S.V., Podorozhnyak A.A. Tekhnologiya postroeniya inertsial'no-sputnikovoi navigatsionnoi sistemy upravleniya transportnymi sredstvami s neirosetevoi optimizatsiei sostava vektora izmerenii // Mekhatronika, avtomatizatsiya, upravlenie. 2007. № 1. S. 39-44.
20. Khar'kov V.P., Korsun O.H., Grebnev O.H. Sintez upravleniya bespilotnym letatel'nym apparatom na osnove metoda obratnykh zadach dinamiki i parametricheskoi identifikatsii // Vestnik komp'yuternykh i informatsionnykh tekhnologii. 2010. № 12. S. 18-23.
21. Kurshev N.V., Kozhevnikov Yu.V. Optimal'nye zadachi dinamiki poleta. Kazan': Izd-vo KGTU im. A.N. Tupoleva, 2010. 326 s.
22. Lebedev A.A., Chernobrovkin L.S. Dinamika poleta bespilotnykh letatel'nykh apparatov. M.: Mashinostroenie, 1973. 616 s.
23. Sannikov V.A., Yureskul A.G. Osnovnye printsipy postroeniya modelei dvizheniya letatel'nykh apparatov. SPb., 2008. 135 s.
24. Kublanov M.S. Matematicheskoe modelirovanie zadach letnoi ekspluatatsii vozdushnykh sudov na vzlete i posadke. M.: RIO MGTU GA, 2013. 270 s.
25. Buravlev A.I., Gorchitsa G.I. Printsip vneshnego dopolneniya i ego primenenie pri analize effektivnosti slozhnykh sistem // Informatsionno-izmeritel'nye i upravlyayushchie sistemy. 2008. T. 6. № 7. S. 14-17.
26. Rudakov I.S., Rudakov S.V., Bogomolov A.V. Metodika identifikatsii vida zakona raspredeleniya parametrov pri provedeniya kontrolya sostoyaniya slozhnykh sistem // Informatsionno-izmeritel'nye i upravlyayushchie sistemy. 2007. T. 5. № 1. S. 66-72.
27. Stivens R. Algoritmy. Teoriya i prakticheskoe primeneniya /. M.: Izdatel'stvo «E», 2016. 544 s.
28. Khar'kov V.P., Isaev S.A. Bezopasnoe upravlenie vektorom skorosti poleta BLA na osnove obratnykh zadach dinamiki // Nauchnye chteniya po aviatsii, posvyashchennye pamyati N.E. Zhukovskogo. 2016. № 4. S. 243-248.
|







